【C++】OpenCVによる畳み込み処理〜画像フィルタからエッジ検出まで
C++とOpenCVを使った畳み込みは、画像のフィルタ処理に特化した「cv::filter2D」を用いる方法です。
任意のカーネルを設定することで、ガウシアンブラーやエッジ抽出など、多様な効果を実現できるため、シンプルな記述で高速な画像処理が可能です。
畳み込み処理の基本
畳み込みの定義と特性
畳み込みは、画像や信号に対して局所的な演算を行うための基本的な手法です。
数学的には、入力画像とカーネル(フィルタ)との積和演算として表され、例えば入力画像を I、カーネルを K とした場合、出力画像 I_output の各画素は
\[I_{\text{output}}(x,y) = \sum_{u}\sum_{v} I(x-u, y-v) \cdot K(u,v)\]
という数式で示すことができます。
畳み込みを用いると、画像の平滑化、エッジ検出、シャープ化など、多彩な処理が実現可能となります。
畳み込みそのものは柔らかい効果から鋭い変化を捉える効果まで、幅広い目的に使える便利な技法です。
カーネルの役割と構造
カーネルは画像に適用する小さな数値行列で、各要素が重みとして画像の周辺画素に作用します。
画像全体に対して同じカーネルを適用することで、局所的な特徴抽出が行われます。
カーネルの基本形状
一般的にカーネルは正方形で、3×3、5×5、7×7などのサイズが使われます。
サイズが小さいほど局所的な特徴に敏感な処理が行えますが、大きいサイズはより広い領域の情報を取り込むことが可能です。
以下はよく使われるカーネルサイズの例です。
- 3×3カーネル:細かいディテールや微小なエッジ検出に向いています
- 5×5カーネル:滑らかな平滑化や、多少大きめのエッジ検出に役立ちます
- 7×7カーネル以上:画像全体のトーン調整やぼかし効果に用いられることがあります
重み付けと正規化の必要性
カーネルの各要素は画像に対する重み付けを行うため、適切な値の設定が重要です。
たとえば、平滑化を狙う場合は周囲の画素の情報をほどよく平均するように重みを配置します。
重みの総和が 1 になるように正規化することで、画像全体の明るさやコントラストが極端に変化しないよう配慮できます。
エッジ検出などの場合は、正規化の必要がない場合もあり、カーネル内の負の値を活かして輝度の急変を捉える工夫がされています。
OpenCVでの畳み込み実装
cv::filter2Dによる処理概要
OpenCVには、cv::filter2D関数を用いて、容易に畳み込み処理が実現できる仕組みが整っています。
cv::filter2D に画像データ、出力画像の変数、出力画像の深度、そしてカーネルを渡すだけで、畳み込みの計算が行われます。
引数 ddepth に -1 を指定すると、入力画像と同じ深度が採用されるため、手軽に利用できる点が魅力です。
入出力画像のデータ管理
畳み込み処理を行う際には、入力画像と出力画像のデータ型や深度、チャネル数などの取り扱いがとても重要です。
OpenCVでは、これらすべてを cv::Matクラスで管理するため、画像の読み込みや変換が簡単に行えます。
画像データ型と深度の取り扱い
OpenCVでは画像の各画素を保持するデータ型として、CV_8U(8ビット符号なし整数)や CV_32F(32ビット浮動小数点数)などが用意されています。
畳み込みでは、計算結果が整数値で表現しきれない場合もあるため、必要に応じて画像の深度を変更する処理を挟むことが求められます。
例えば、エッジ検出などの際に浮動小数点型を使用すると滑らかな計算が実現できます。
複数チャネル画像の処理方法
カラー画像の場合、通常 RGB の 3チャネルが存在します。
cv::filter2D関数は各チャネルに同じカーネル処理を並行して適用するため、カラー画像のフィルタリングにもスムーズに対応できます。
ブレンド処理や色空間変換と組み合わせることで、より多彩な表現が可能になります。
カーネル作成の方法
カーネルは手動で作成することも、自動生成やカスタム設計することも可能です。
OpenCVでは、cv::Mat の初期化時に直接カーネルの値を指定できるため、シンプルなアルゴリズム実装に適しています。
手動カーネル設定のポイント
手動でカーネルを作成する場合、以下のポイントを抑えると扱いやすくなります。
- カーネルのサイズを明確に決める
- 各要素の数値を適切に配置して、目的に応じた効果が得られるようにする
- 必要に応じて正規化を行い、画像全体の輝度の変化を抑える
カスタムカーネルの応用例
カスタムカーネルを利用すると、シャープ化やエンボス、独自のフィルタ処理が実現可能です。
以下は、シャープ化フィルタのサンプルコードです。
#include <opencv2/opencv.hpp>
#include <iostream>
int main() {
// 入力画像の読み込み(画像ファイル名は適宜変更してください)
cv::Mat inputImage = cv::imread("input.jpg");
if (inputImage.empty()) {
std::cerr << "画像の読み込みに失敗しました。" << std::endl;
return -1;
}
// シャープ化カーネルの定義(3x3カーネル)
cv::Mat sharpeningKernel = (cv::Mat_<float>(3, 3) <<
0, -1, 0,
-1, 5, -1,
0, -1, 0);
cv::Mat outputImage;
// シャープ化フィルタの適用
cv::filter2D(inputImage, outputImage, inputImage.depth(), sharpeningKernel);
// 入力画像とシャープ化された画像の表示
cv::imshow("Input Image", inputImage);
cv::imshow("Sharpened Image", outputImage);
cv::waitKey(0);
return 0;
}(Input Image と Sharpened Image のウィンドウが表示される)
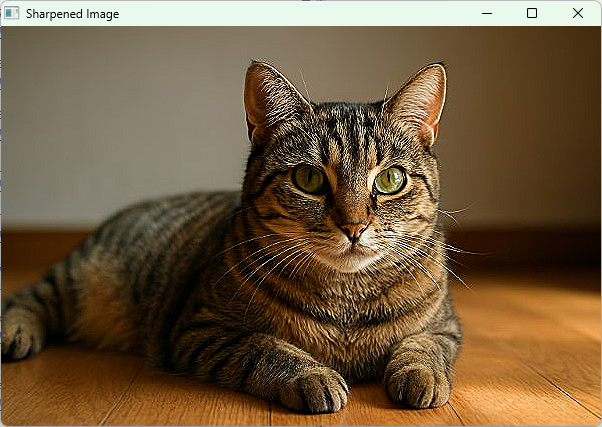
サンプルコード内では、まず入力画像を読み込み、3×3のシャープ化カーネルを定義しています。
cv::filter2D を使い、入力画像にカーネルを適用した結果を出力画像として表示しています。
シンプルな実装ながら、カスタムカーネルの応用例として効果を確認できます。
画像フィルタ処理の応用事例
平滑化フィルタによる効果
平滑化フィルタは、画像のノイズを除去したり、ぼかし効果を与えるために使われます。
ガウシアンブラーや平均化フィルタは、各画素の値を周囲の画素と調和させることで、自然なぼかし効果を実現します。
平滑化により、画像の不要なディテールがやわらかくなり、後続処理のエッジ検出などにもプラスの影響を与えることが多くあります。
エッジ検出フィルタの適用
エッジ検出は、画像の輪郭や形状の特定にとても有用です。
エッジ検出フィルタは、急激な輝度変化を強調することで、物体の境界を明確にする効果があります。
以下に、ソーベルフィルタとラプラシアンフィルタの利用方法を紹介します。
ソーベルフィルタの実用例
ソーベルフィルタは、画像の水平方向や垂直方向のエッジを抽出するために広く使われます。
OpenCVの cv::Sobel関数を利用すれば、簡単にエッジ検出が可能です。
たとえば、以下のようなコードで水平エッジを抽出できます。
#include <opencv2/opencv.hpp>
#include <iostream>
int main() {
// 入力画像の読み込み
cv::Mat inputImage = cv::imread("input.jpg", cv::IMREAD_GRAYSCALE);
if (inputImage.empty()) {
std::cerr << "画像の読み込みに失敗しました。" << std::endl;
return -1;
}
cv::Mat sobelOutput;
// 水平方向のエッジ検出(x方向微分)
cv::Sobel(inputImage, sobelOutput, CV_16S, 1, 0);
// 絶対値を取って結果を表示用に変換
cv::Mat absSobelOutput;
cv::convertScaleAbs(sobelOutput, absSobelOutput);
cv::imshow("Input Image", inputImage);
cv::imshow("Sobel Edge", absSobelOutput);
cv::waitKey(0);
return 0;
}(グレースケールの入力画像とソーベルフィルタで抽出されたエッジ画像が表示される)
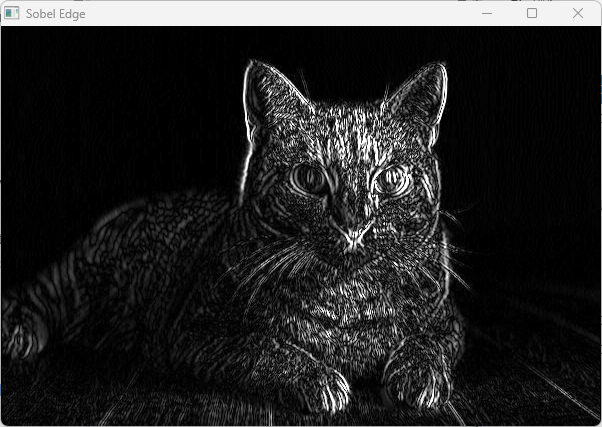
このコードでは、グレースケール画像に対してcv::Sobel関数を用いて水平方向の微分演算を実施しています。
エッジ領域が強調され、物体の輪郭がクリアに確認できます。
ラプラシアンフィルタの利用例
ラプラシアンフィルタは、画像の二階微分を計算することでエッジや急激な輝度変化を抽出します。
ソーベルフィルタと異なり、方向に依存せず全方向の変化を補足するのが特徴です。
cv::Laplacian関数を用いると、以下のようにシンプルな実装が可能です。
#include <opencv2/opencv.hpp>
#include <iostream>
int main() {
// 入力画像の読み込み
cv::Mat inputImage = cv::imread("input.jpg", cv::IMREAD_GRAYSCALE);
if (inputImage.empty()) {
std::cerr << "画像の読み込みに失敗しました。" << std::endl;
return -1;
}
cv::Mat laplacianOutput;
// ラプラシアンフィルタの適用(2階微分)
cv::Laplacian(inputImage, laplacianOutput, CV_16S);
cv::Mat absLaplacianOutput;
cv::convertScaleAbs(laplacianOutput, absLaplacianOutput);
cv::imshow("Input Image", inputImage);
cv::imshow("Laplacian Edge", absLaplacianOutput);
cv::waitKey(0);
return 0;
}(グレースケールの入力画像とラプラシアンフィルタで抽出されたエッジ画像が表示される)
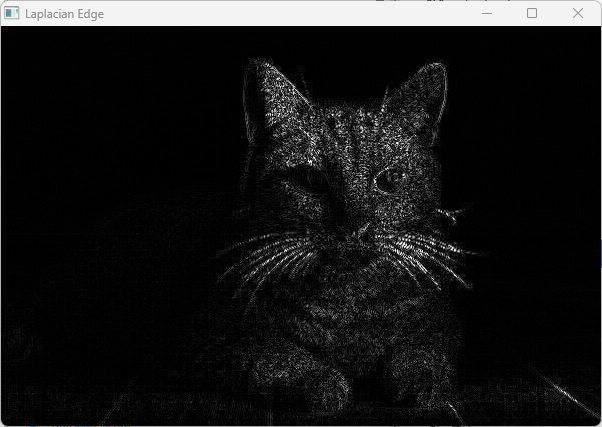
上記の例では、ラプラシアンフィルタを用いて画像の急激な輝度差分が強調されています。
方向に依存しないため、輪郭全体が均等に捉えられるのが特徴です。
ノイズ除去などのその他処理
画像のノイズを除去するためのフィルタとしては、メディアンフィルタや二値化処理、バイラテラルフィルタなどが挙げられます。
たとえば、メディアンフィルタは、各画素に対して周辺の中央値を計算することでノイズ成分を削減し、画像のディテールを損なわずに滑らかさを出すのに向いています。
- メディアンフィルタ:塩胡椒ノイズの除去に有効です
- バイラテラルフィルタ:エッジを保持しながらノイズを除去できます
- 二値化処理:特定の閾値を基に画像を白黒に変換することで、シンプルな形状認識が可能になります
これらのフィルタは、畳み込み処理と組み合わせることで、さらにしっかりとした画像処理パイプラインを構築する助けになります。
畳み込みパラメータの調整ポイント
カーネルサイズの選定基準
カーネルサイズの選び方は、目的とする画像処理の内容に大きく依存します。
小さなサイズでは局所的な変化に敏感な処理が可能ですが、ノイズが強い画像の場合は大きなサイズを用いることで全体の平滑化が実現しやすくなります。
以下の点に注意するとよいです。
- 画像の解像度や対象のサイズ
- 処理後の画像の用途(平滑化、エッジ強調など)
- 計算量や処理速度とのトレードオフ
重み調整と正規化手法
カーネル内の各重みの調整は、フィルタの最終的な効果に大きな影響を与えます。
適切に重みを調整し、必要な場合は正規化処理を入れることで、出力画像の品質が向上します。
数値パラメータの具体例
以下は、代表的なカーネルの数値例です。
\[\frac{1}{9}\begin{bmatrix}1 & 1 & 1 \\1 & 1 & 1 \\1 & 1 & 1\end{bmatrix}\]
\[\frac{1}{16}\begin{bmatrix}1 & 2 & 1 \\2 & 4 & 2 \\1 & 2 & 1\end{bmatrix}\]
\[\begin{bmatrix}-1 & 0 & +1 \\-2 & 0 & +2 \\-1 & 0 & +1\end{bmatrix}\]
\[\begin{bmatrix}-1 & -2 & -1 \\0 & 0 & 0 \\+1 & +2 & +1\end{bmatrix}\]
\[\begin{bmatrix}0 & -1 & 0 \\-1 & 4 & -1 \\0 & -1 & 0\end{bmatrix}\]
これらは一例であり、画像の特性や望む効果に合わせて調整することができます。
各フィルタの数値は、目的に沿って慎重に選ぶ必要があります。
結果評価の視点
フィルタリングの結果は、目視検査や統計的な画像品質評価手法を用いて評価できます。
具体的には、以下の視点が参考になります。
- エッジやディテールの保持具合
- ノイズ除去と平滑化のバランス
- 画像全体の明るさの変化や、コントラストの影響
複数のパラメータを変更し、結果を比較することで最適な設定を見つけることが実用的です。
処理効率とパフォーマンス向上の工夫
並列処理による高速化
画像処理は各画素ごとに独立した計算が可能なため、並列処理を導入することで高速化が実現しやすくなります。
マルチスレッド処理やハードウェアアクセラレーションを組み合わせれば、大きな画像でもスムーズに処理できる環境を整えることができます。
マルチスレッド処理の適用例
OpenCVは内部的に並列処理を行う仕組みが組み込まれているため、画像のサイズや処理内容が大きい場合も自動的にマルチスレッドが利用される場合があります。
また、場合によっては OpenMP など外部ライブラリを使って、明示的に並列化するコードを記述することも可能です。
- マルチスレッドによって、CPU の複数コアをフル活用できる
- 並列処理により、リアルタイム処理にも近い速度を実現できる
メモリ最適化の考慮ポイント
画像データは連続したメモリ領域として保持されているため、キャッシュフレンドリーなアクセスパターンを意識すると効果的です。
以下の点に注意することが推奨されます。
- 画像の ROI(Region Of Interest)を活用して不要な計算を省く
- 連続したメモリ領域にアクセスするようにし、キャッシュヒット率を向上させる
- 必要に応じて画像の前処理やリサイズを行い、処理負荷を軽減する
リアルタイム処理への展開例
リアルタイム処理を目指す場合、並列処理だけでなく GPU を利用した高速化も検討できます。
OpenCV の CUDA モジュールや OpenCL 対応により、複雑なフィルタ処理でも実時間での処理が可能な環境を構築できる場合があります。
たとえば、ライブ映像からエッジだけを抽出する処理など、リアルタイム性が求められるアプリケーションにも柔軟に対応できるよう工夫が進められます。
- GPU アクセラレーションにより、膨大な画素数の画像でも高速な処理が可能
- リアルタイム映像処理において、カメラ入力とフィルタ出力が遅延なく表示される環境が期待できる
まとめ
今回の内容では、畳み込み処理の基本からカーネルの役割、OpenCVでの実装方法、さらに各種画像フィルタの応用事例まで幅広く扱いました。
柔らかく分かりやすい説明を心掛け、実際に使えるサンプルコードを交えながら、畳み込み処理の仕組みとその応用について詳しく紹介しました。
各パラメータの調整ポイントや、処理効率の向上に関する工夫についても触れ、実践的な知識を提供できたと感じます。
記事全体を通して、畳み込み処理の魅力と実装の柔軟性が伝わる内容になれば嬉しいです。