【C++】OpenCVライブラリを活用した画像処理とコンピュータビジョンの実用応用法
OpenCVライブラリは、C++で画像処理やコンピュータビジョンの機能を簡潔に実装できるツールです。
豊富な関数群により、画像変換、フィルタ処理、エッジ検出やオブジェクト認識など、多彩な用途に対応できる点が魅力です。
高速な処理性能と柔軟な設計が、さまざまなプロジェクトでの採用を後押ししており、シンプルなコードで複雑な処理を実現できる利便性が高く評価されています。
OpenCVライブラリの特徴
OpenCVは画像処理やコンピュータビジョンの分野で広く使用されるライブラリです。
画像の読み込み、加工、解析、認識など、幅広い機能が提供されており、柔らかい操作感で利用できる点が魅力です。
基本機能とライブラリ構成
OpenCVは基本機能と補助的なツールがうまく統合され、画像処理のさまざまな工程に対応できます。
モジュールごとに分かれているので、必要な機能だけを選択しながら利用することができます。
画像操作とフィルタ処理
画像の読み込み、保存、表示といった基本操作から、平滑化、シャープ化、ノイズ除去などのフィルタ処理をシンプルに実装できます。
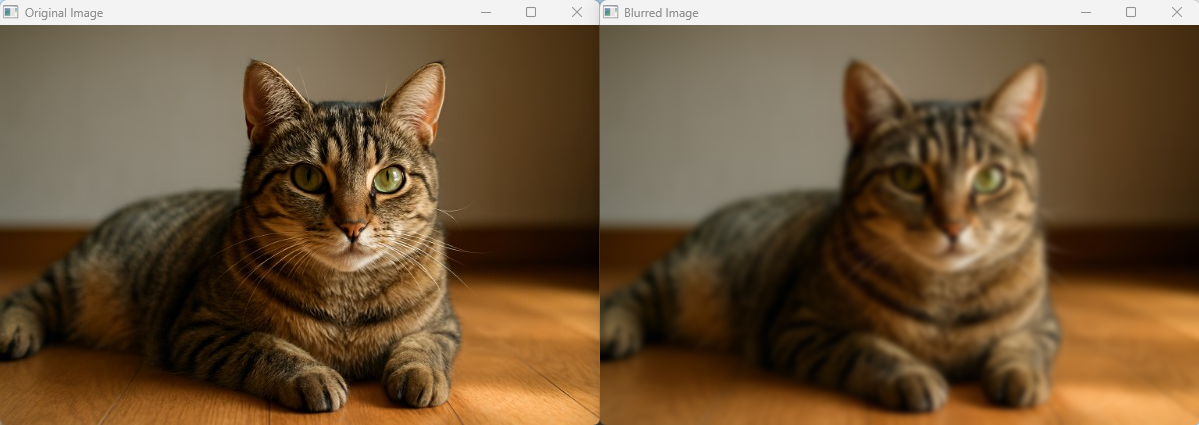
たとえば、cv::GaussianBlurを利用することで、画像のブラー処理を柔軟に行えます。
- 画像の読み込みと保存は、
cv::imreadとcv::imwriteが利用されます - フィルタ処理には、ブラー、メディアンフィルタ、バイラテラルフィルタなどの複数の手法が存在します
実際のコード例として、下記のコードは画像を読み込み、Gaussian Blurを適用して保存する処理を示しています。
#include <opencv2/opencv.hpp> // OpenCVの基本的な機能を利用するためのヘッダー
#include <iostream>
int main() {
// 画像ファイルを読み込みます。画像ファイルは"input.jpg"です。
cv::Mat originalImage = cv::imread("input.jpg");
if (originalImage.empty()) {
std::cout << "画像を読み込めませんでした。" << std::endl;
return -1;
}
// GaussianBlurを使って画像にブラー効果を適用します。
cv::Mat blurredImage;
cv::GaussianBlur(originalImage, blurredImage, cv::Size(15, 15), 0);
// ブラーを適用した画像を"blurred.jpg"として保存します。
cv::imwrite("blurred.jpg", blurredImage);
// プログラムの動作確認として、ウィンドウに元画像とブラー画像を表示します。
cv::imshow("Original Image", originalImage);
cv::imshow("Blurred Image", blurredImage);
cv::waitKey(0); // キーが押されるまでウィンドウを表示します。
return 0;
}
画像変換および色空間変換
OpenCVは多種類の画像変換をサポートしています。
例えば、画像のリサイズや回転、反転といった幾何学的変換のほか、RGBやグレースケール、HSVなどさまざまな色空間への変換が可能です。
画像変換の際には、cv::resizeやcv::cvtColorなどの関数が利用され、特定の用途に応じた変換操作がシンプルに実現できます。
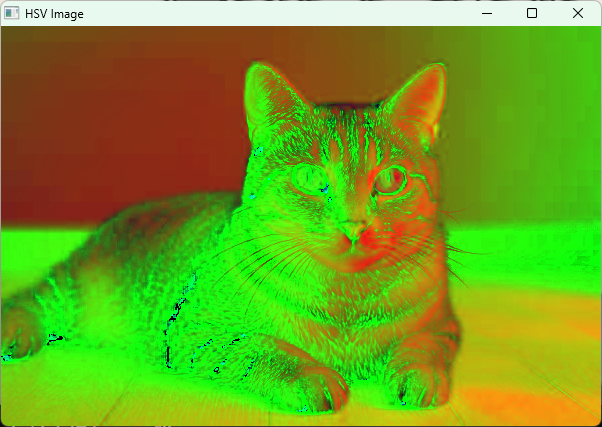
たとえば、RGB画像をHSVに変換する際は、以下のような呼び出しを行います。
#include <opencv2/opencv.hpp>
#include <iostream>
int main() {
// RGB画像を読み込みます
cv::Mat rgbImage = cv::imread("color_image.jpg");
if (rgbImage.empty()) {
std::cout << "画像の読み込みに失敗しました。" << std::endl;
return -1;
}
// RGBからHSVへの変換
cv::Mat hsvImage;
cv::cvtColor(rgbImage, hsvImage, cv::COLOR_BGR2HSV);
// 変換した画像を表示します
cv::imshow("HSV Image", hsvImage);
cv::waitKey(0);
return 0;
}
高度な画像処理機能
OpenCVは基本機能に加え、より高度な画像解析や認識も行える機能が豊富に備わっています。
エッジ検出や輪郭抽出、画像内の特徴量抽出などが簡単に実現でき、深い解析まで可能としています。
エッジ検出と輪郭抽出
エッジ検出は、画像内の物体の境界や形状を明確に抽出するための手法です。
cv::Canny関数を利用することで、エッジ検出が簡単に実施できます。
また、検出されたエッジを基に輪郭を抽出し、各オブジェクトの形状情報を活用することもできます。
輪郭抽出では、cv::findContoursを用いるのが一般的です。
- Cannyエッジ検出
- 輪郭抽出と描画
これらの機能は、物体認識やシーン解析の前処理として非常に有効に働くため、効果的な解析を目指す際によく使用されます。
特徴量抽出およびマッチング
画像内の特徴点を抽出し、別の画像とマッチングすることで、対象物の同定や変化の追跡が可能です。
cv::ORBやcv::SIFTなどのアルゴリズムが代表的で、これらを利用することで、画像間の対応点を柔軟に見つけることができます。
特徴量マッチングは、画像認識やシーン再構築に大きな効果があり、複数の視点から得た情報を統合して解析する際にも利用されています。
コンピュータビジョン機能
基本的な画像処理を超え、OpenCVは物体認識や形状解析などのコンピュータビジョンに必要な高度な機能を備えています。
これにより、実世界での複雑なシーン解析が柔軟に行えます。
物体認識と追跡
物体認識では、画像中から特定の対象を自動的に検出する機能が提供されています。
また、追跡機能は、時間軸に沿って対象物の動きを追いかけることができ、セキュリティソリューションなどで利用されています。
- 物体検出には、Haar分類器や深層学習を用いた手法が使われる
- 追跡アルゴリズムとしては、KLT特徴点追跡やMeanShiftなどがあり、シーン内の動きを柔軟に捉えます
形状解析およびパターン認識
形状解析では、抽出した輪郭や特徴点を元に対象物の幾何学的性質を求めることができます。
パターン認識も同様に、計算機が画像内のパターンを学習して分類するためのアルゴリズムが組み込まれており、さまざまな応用が広がります。
- 輪郭の凸包や近似、多角形フィッティングなどが利用される
- マシンラーニングアルゴリズムと連携して、画像内のパターンを分類する方法が提供されています
C++との連携
OpenCVはC++と密接に連携できるライブラリであり、シンプルに統合できる点が大きな魅力です。
C++の高いパフォーマンスと柔軟性を活かして、多彩な画像処理アプリケーションが実現できます。
OpenCVのインクルードとリンク設定
C++プロジェクトにOpenCVを組み込む際は、適切なインクルードパスとライブラリのリンク設定が必要です。
Visual StudioやCMakeなどのビルド環境では、プロジェクトの設定画面やCMakeLists.txtにOpenCVのパスを正しく指定することで、スムーズに利用できるようになります。
- ヘッダーは必ず
#include <opencv2/opencv.hpp>などで読み込みを実施 - リンク設定は、各プラットフォームに応じたライブラリファイルを指定する必要があります
C++での実装上の留意点
C++固有の特徴として、メモリ管理やオブジェクトのライフサイクルに注意する必要があります。
ポインタの取り扱いや、例外処理の仕組みを利用して、意図しないクラッシュを防ぐ工夫が推奨されます。
リソースが大きくなる画像処理の際には、スマートポインタの利用が効果的な場合も多く見受けられます。
ビルドシステムとの統合
C++プロジェクトにおいては、CMakeなどのビルドシステムとの統合が便利です。
CMakeLists.txtにOpenCVのパッケージ検出コマンドを記述するだけで、環境に応じたライブラリの取得が自動的に行われるので、設定が容易です。
- CMakeでの設定例:
find_package(OpenCV REQUIRED)include_directories(${OpenCV_INCLUDE_DIRS})target_link_libraries(MyProject ${OpenCV_LIBS})
画像処理アルゴリズムの構築
画像処理アルゴリズムは、シンプルな変換から複雑な解析までさまざまな工程で構成されており、各工程が連携して柔らかい操作感を実現しています。
幾何学的変換の実装
画像の幾何学的変換は、画像自体の形状を変える基本的かつ重要な部分です。
画像の回転、拡大、縮小など、さまざまなケースに対応が可能です。
回転、拡大、縮小処理
画像の回転やリサイズは、各種変換行列を利用して実施することができます。
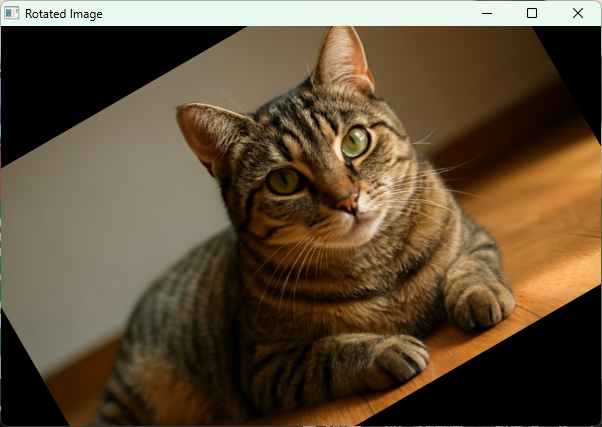
例えば、画像の回転は、回転行列を作成してcv::warpAffineを呼び出すことで実装できます。
#include <opencv2/opencv.hpp>
#include <iostream>
#include <cmath>
int main() {
cv::Mat srcImage = cv::imread("rotate_input.jpg");
if (srcImage.empty()) {
std::cout << "画像の読み込みに失敗しました。" << std::endl;
return -1;
}
// 画像中心を計算します
cv::Point2f center(srcImage.cols / 2.0f, srcImage.rows / 2.0f);
// 回転角度を30度に設定し、スケールは1.0にします
double angle = 30.0;
double scale = 1.0;
// 回転行列を取得します
cv::Mat rotMatrix = cv::getRotationMatrix2D(center, angle, scale);
cv::Mat rotatedImage;
cv::warpAffine(srcImage, rotatedImage, rotMatrix, srcImage.size());
// 結果を保存または表示します
cv::imshow("Rotated Image", rotatedImage);
cv::waitKey(0);
return 0;
}
アフィン変換および射影変換
アフィン変換は、平行移動、回転、拡大縮小が統一的に行える変換で、直線性を保ったままでの変形に利用できます。
射影変換は、画像に透視効果を与える際に利用され、対象物が遠近法に沿って変形する様子を再現するために有効です。
どちらもcv::warpAffineやcv::warpPerspectiveが利用でき、柔軟な画像変換が実現可能です。
フィルタ処理と画像平滑化
画像の平滑化やエッジの強調は、画像から不要なノイズを除去し、目的に合わせた特徴を浮かび上がらせるための処理です。
それぞれのフィルタは異なる効果を持ち、処理対象に応じた使い分けが推奨されます。
ブラー処理
画像のブラー処理は、画像のノイズを低減するための基本手法です。
Gaussian BlurやMedian Blurなどが柔軟に利用でき、スムーズな画像を作り出す際に有効な手法です。
先のサンプルコードでも示したように、cv::GaussianBlurがシンプルに呼び出せることが魅力です。
エッジ強調フィルタ
エッジ強調フィルタは、画像内の境界線や輪郭を強調するために使われます。
シャープニングフィルタやラプラシアンフィルタといった手法があり、画像のディテールをハッキリと浮かび上がらせることができます。
エッジ強調は、画像認識や解析前の前処理として利用されることがよくあります。
色空間変換と情報抽出
色変換は、画像解析において大変重要な処理です。
特定の色空間に変換することで、画像中の情報や特徴を明確に抽出できます。
RGBからHSVへの変換
RGBからHSVへの変換では、画像内の色相、彩度、明度といった情報を抽出でき、色に基づくセグメンテーションや解析が柔軟に行えます。
RGBとHSVの変換はcv::cvtColorで簡単に実現でき、例えば下記のように記述できます。
#include <opencv2/opencv.hpp>
#include <iostream>
int main() {
cv::Mat rgbImage = cv::imread("sample_color.jpg");
if (rgbImage.empty()) {
std::cout << "画像の読み込みに失敗しました。" << std::endl;
return -1;
}
cv::Mat hsvImage;
cv::cvtColor(rgbImage, hsvImage, cv::COLOR_BGR2HSV);
// HSV画像の各チャネルの平均値を計算してみます
std::vector<cv::Mat> hsvChannels;
cv::split(hsvImage, hsvChannels);
cv::Scalar meanH = cv::mean(hsvChannels[0]);
cv::Scalar meanS = cv::mean(hsvChannels[1]);
cv::Scalar meanV = cv::mean(hsvChannels[2]);
std::cout << "Mean Hue: " << meanH[0] << std::endl;
std::cout << "Mean Saturation: " << meanS[0] << std::endl;
std::cout << "Mean Value: " << meanV[0] << std::endl;
cv::imshow("HSV Image", hsvImage);
cv::waitKey(0);
return 0;
}Mean Hue: 17.2006
Mean Saturation: 154.636
Mean Value: 104.265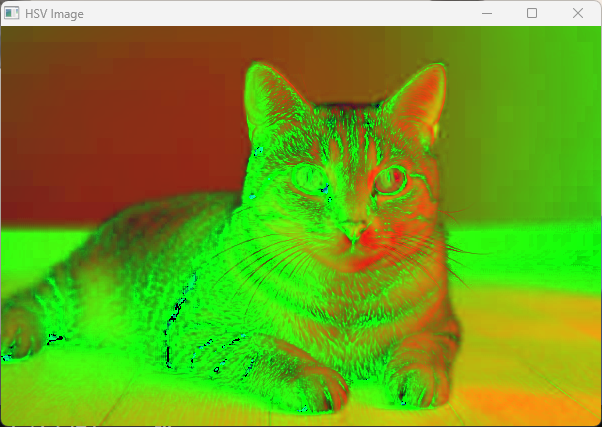
ヒストグラム処理
ヒストグラム処理は、画像の輝度分布や色の傾向を把握するために有用です。
cv::calcHistなどを利用することで、輝度や色の頻度を計算し、画像の特性を定量的に評価することができます。
こうした解析は画像の前処理や画像比較の基準として活用されることが多いです。
コンピュータビジョンの応用例
応用例では、画像の解析や認識を活かし、実際の課題解決に寄与する事例が数多く存在します。
細かな画像分割から動体の追跡まで、コンピュータビジョンは多彩なシーンで利用されています。
物体検出の手法
物体検出の手法としては、画像中の特定領域を選択し、対象物を認識することが主な目的です。
柔らかな画像処理アルゴリズムを用いて、対象の抽出やマーキングが実施されます。
領域ベースの検出
領域ベースの検出は、画像の領域ごとに特徴を抽出し、対象物が存在する領域を特定する方法です。
色の特徴やテクスチャー、形状情報を活用して、対象物に似た領域を抽出します。
たとえば、しきい値処理を組み合わせることで、背景と対象物の差異を明確にできます。
テンプレートマッチング
テンプレートマッチングは、事前に用意されたテンプレート画像を使って、入力画像内にマッチする部分を探す手法です。
cv::matchTemplateを利用して、画像の類似度を計算し、検出することが容易に実現できます。
比較的シンプルな条件下での物体認識には有効な方法です。
画像分割と領域抽出
画像分割は複雑な画像から対象となる領域を抽出する技法で、画像の解析や認識に大変役立ちます。
各領域を区別することで、細かな処理を個別に適用することが可能になります。
しきい値処理
しきい値処理は、画像の輝度や色成分に基づき、対象領域を明瞭に分離する技法です。
グレースケール画像に対して、一定の値を境に2値化することで、対象物と背景をシンプルに分けることができます。
cv::thresholdがよく利用される関数で、シンプルながら効果的な手法です。
クラスタリング手法
クラスタリング手法は、画像内の類似ピクセルをグループ分けすることで、複数の領域に分割する方法です。
K-meansクラスタリングなどのアルゴリズムを活用して、画像中の領域を統計的にグループ分けすることができます。
この方法は、複雑なシーンでも柔軟に対応でき、対象物の抽出精度を高めるために使われます。
追跡アルゴリズム
動体追跡は、連続するフレーム間で対象物の位置を検出し、移動パターンを追うために利用されるアルゴリズムです。
複数の実装例が存在し、動きのスムーズな確認と解析に貢献しています。
連続フレーム解析
連続フレーム解析は、動画データにおける画像処理技法で、各フレーム間の変化を検出して対象物を追いかけます。
フレーム毎に画像処理を行い、対象の位置や動きを計算するため、リアルタイムの解析が期待できます。
動体検知と予測
動体検知は、背景との差分から動いている領域を抽出する方法で、セキュリティや監視システムで活用されることが多いです。
検出した動体に対して、将来の位置を予測するアルゴリズムも組み合わせることで、より高度な解析が可能です。
パフォーマンス最適化の工夫
画像処理アルゴリズムにおいては、計算負荷の高さや大容量データの取り扱いが課題となることが多いです。
柔らかく効率的な運用を実現するために、メモリ管理や並列処理を工夫する必要があります。
効率的なメモリ管理
画像データは大容量となるため、効率的なメモリ管理が求められます。
OpenCVは内部でメモリの再利用やスマートな管理を行っているが、C++コード側でもリソースの開放やキャッシュ機構を意識することで、さらに効率が上がります。
並列処理と高速化
複雑な演算や大量データの処理を高速化するために、並列処理が有効です。
以下の手法が柔軟に利用できます。
マルチスレッドの活用
C++のマルチスレッド機能やOpenCVの並列処理機能を組み合わせることで、同時に複数の画像処理を実施できます。
これにより、リアルタイム性が求められるアプリケーションでも高いパフォーマンスが期待できます。
GPUアクセラレーションの利用
GPUを活用した画像処理は、並列計算が得意なため、処理速度が大幅に向上します。
OpenCVではCUDAやOpenCLに対応する関数が提供されており、ハードウエアの特性を活かし柔軟に実装できます。
計算負荷の評価と対策
システム全体のパフォーマンスを向上させるためには、各アルゴリズムの計算負荷を評価し、最適な対策を講じる必要があります。
プロファイリングによる改善
プログラムの実行速度を測定するためのプロファイリングツールを利用して、ボトルネックとなる部分を特定することで、効率的な改善が可能です。
例えば、cv::TickMeterを用いると、各処理の時間計測が手軽に実施できます。
最適なデータ構造の選定
データのアクセスパターンや変更頻度に合わせて、最適なデータ構造を選択することが処理速度の向上に寄与します。
シンプルな画像処理ではcv::Matが基本ですが、場合に応じてSTLのコンテナやカスタム構造体と組み合わせると、さらに柔軟な実装が可能になります。
エラー処理とデバッグ対策
画像処理は外部データとの連携が多いため、エラー処理やデバッグ対策が重要となります。
予期しない入力や状況変化に対しても、安定した動作を実現するための工夫が求められます。
例外処理の実装方法
C++の例外処理機能を用いることで、画像読み込みや変換時のエラーに対して柔軟かつ安全な対策が取れます。
try-catch構文を利用して、エラー発生時に適切なメッセージ出力やリソース開放を行うことが推奨されます。
ログ管理と診断手法
ログ出力を活用することで、問題発生時の原因究明がしやすくなります。
OpenCVのエラー時のメッセージに加えて、プログラム側で詳細なログを記録すると、後のデバッグが円滑に進みます。
また、ログレベルの設定を動的に変更できるような仕組みを導入すると、普段の動作や問題発生時に合わせた詳細な情報を得やすくなります。
既知の問題と対策
OpenCVや利用するプラットフォームごとに、既知の問題が存在する場合があります。
これらの情報をコミュニティや公式ドキュメントから収集し、適切な回避策をコーディングに反映することで、安定したアプリケーション実装が可能になります。
応用事例のケース検討
実際のケースでOpenCVとC++を利用した画像処理やコンピュータビジョンの実装例は、多彩な分野で適用され、柔らかい操作感と高い信頼性が評価されています。
以下は代表的な応用事例で、各分野の特性に合わせた実装が行われています。
画像認識システムへの展開
画像認識システムでは、顔認識や物体認識を柔軟に実装するためのアルゴリズムが導入されます。
特徴抽出やテンプレートマッチングの組み合わせにより、対象物の検出精度が向上し、複雑なシーンでも安定した動作が期待できる仕組みが整えられています。
監視システムでの実装例
監視システムでは、動体検知や物体追跡といった技術が採用され、リアルタイムに変化を追跡する事例が多く見受けられます。
シンプルな背景差分から始まり、動体の輪郭抽出、連続フレーム解析までの一連の処理が統合され、効率的なセキュリティ対策が可能になっています。
自動運転分野における利用例
自動運転技術では、カメラを中心としたセンサー情報をもとに道路標識や歩行者、他車両の認識が不可欠です。
OpenCVの豊富な画像処理機能とC++の高速な実行環境が組み合わさることで、リアルタイムに路上の変化を捉えるシステムが実現されています。
具体的には、画像分割と特徴点抽出、追跡アルゴリズムを連携させたシステム構成により、安全性と信頼性が向上しています。
まとめ
今回紹介した内容では、OpenCVの基本機能から高度な画像処理、コンピュータビジョンの応用例まで、C++との連携を踏まえて柔らかい文体で説明しました。
各機能の特徴をしっかり理解しながら、実用的なアルゴリズムを実装していくと、実世界の問題に対して柔軟に対応できる仕組みを作り上げることができるでしょう。
多様な応用事例とパフォーマンス最適化の工夫を参考に、実装のアイデアを膨らませながら、安心して活用できる画像処理システムを構築できることを願っています。