【C++】OpenCVで実現する画像分割 ― Watershed、K-means、GrabCut手法の比較と実装ポイント
C++とOpenCVを使った画像分割は、画像内のオブジェクトをそれぞれの領域に分ける処理であり、WatershedやK-means、GrabCutなどの手法が活用されます。
各手法は、色や形、テクスチャーに基づきピクセルをグループ化するため、前景と背景の切り分けや複雑な画像のセグメント化が可能です。
用途に合わせた技法の選択で、効率よく処理を実現できる点が魅力です。
Watershedアルゴリズムによる画像分割の詳細
Watershedアルゴリズムは、水が流れるようなイメージで領域を区切る手法です。
各領域の境界が明確になりやすく、細かいオブジェクトの抽出に役立ちます。
ここでは、前処理からマーカー設定、セグメント分割、後処理に至るまでの流れを柔らかい文体で説明します。
前処理とマーカー設定
画像に対する前処理は、分割の精度に直結するため、慎重に行う必要があります。
画像のノイズや不要な情報をできるだけ除去し、明瞭なエッジを抽出する工夫が求められます。
さらに、アルゴリズムが正しく領域を認識できるよう、前景と背景を示すマーカーを設定することも大切です。
ノイズ除去とエッジ検出手法
ノイズ除去は、ヒストグラムの平滑化やガウシアンフィルタを用いる方法が一般的です。
例えば、GaussianBlur関数を使う場合、画像全体のぼかしを軽減し、エッジ検出の際に誤認識が少なくなります。
また、Cannyエッジ検出はエッジを強調するために使われ、境界ラインを明確にする効果があります。
以下に、Watershedアルゴリズム用の前処理サンプルコードを示します。
#include <opencv2/opencv.hpp>
#include <iostream>
using namespace cv;
using namespace std;
int main() {
// 画像をグレースケールで読み込む
Mat src = imread("sample.jpg", IMREAD_GRAYSCALE);
if (src.empty()) {
cout << "画像が読み込めませんでした" << endl;
return -1;
}
// ガウシアンフィルタでノイズ除去
Mat blur;
GaussianBlur(src, blur, Size(5, 5), 2.0);
// Cannyエッジ検出でエッジを抽出
Mat edges;
Canny(blur, edges, 50, 150);
// 結果の表示
imshow("入力画像", src);
imshow("ノイズ除去後", blur);
imshow("エッジ検出結果", edges);
waitKey(0);
return 0;
}画像ウィンドウに「入力画像」、「ノイズ除去後」、「エッジ検出結果」が表示されます。
各ウィンドウで、エッジがはっきりと識別できる様子が確認できます。
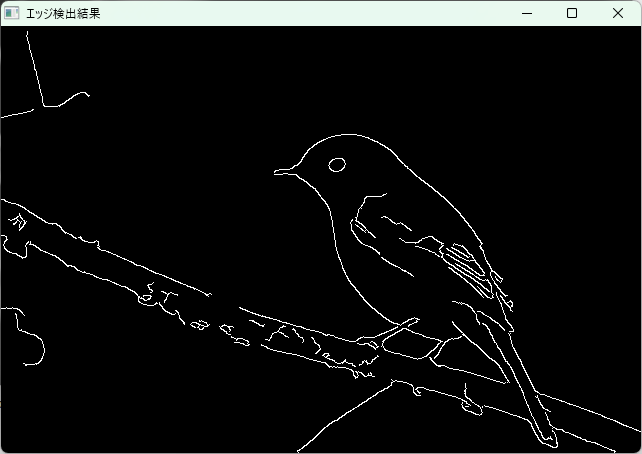
このコードは、画像の前処理に重点を置いており、エッジが明確になるように工夫を重ねています。
正確なマーカー設定につなげるためには、エッジ情報の利用が鍵となるため、注意深くパラメータを設定する必要があります。
自動マーカー生成の工夫
マーカー設定は手動指定だけでなく、自動化も進んでいます。
たとえば、画像の二値化を行い、モルフォロジー変換などで小さな領域を調整することで、自動マーカー生成が実現できます。
以下は、自動マーカー生成のサンプルコードの例です。
#include <opencv2/opencv.hpp>
#include <iostream>
using namespace cv;
using namespace std;
int main() {
// 入力画像の読み込み(カラー画像)
Mat src = imread("sample_color.jpg");
if (src.empty()) {
cout << "画像が読み込めません" << endl;
return -1;
}
// グレースケール変換と二値化
Mat gray, binary;
cvtColor(src, gray, COLOR_BGR2GRAY);
threshold(gray, binary, 0, 255, THRESH_BINARY_INV + THRESH_OTSU);
// ノイズ除去のためのモルフォロジー変換
Mat kernel = getStructuringElement(MORPH_RECT, Size(3, 3));
Mat opening;
morphologyEx(binary, opening, MORPH_OPEN, kernel, Point(-1, -1), 2);
// 距離変換を使ってマーカーの候補を抽出
Mat dist;
distanceTransform(opening, dist, DIST_L2, 5);
normalize(dist, dist, 0, 1.0, NORM_MINMAX);
threshold(dist, dist, 0.4, 1.0, THRESH_BINARY);
Mat markers;
dist.convertTo(markers, CV_8U);
// 結果表示と保存
imshow("二値化", binary);
imshow("モルフォロジー処理", opening);
imshow("自動マーカー", markers);
waitKey(0);
return 0;
}ウィンドウに「二値化」、「モルフォロジー処理」、「自動マーカー」の画像が表示されます。
画像から抽出されたマーカーが確認でき、後続のWatershed処理に適用できる準備が整います。この自動マーカー生成によって、手動での煩雑な作業を軽減でき、分割精度が向上する可能性があります。
細かい調整を行いながら、画像特有のパラメータを見極めるとよいでしょう。
セグメント分割と後処理
前処理とマーカー設定が済んだら、Watershedアルゴリズムによる分割を実行できます。
ここでは、各領域に水が流れ込むようなイメージを利用して、セグメントごとに領域が分離されます。
分割後は、境界調整や領域補正、結果の最適化を加えることで、分割精度の向上が期待されます。
境界調整と領域補正策
境界調整はセグメント間のギャップを滑らかにする目的で行い、曖昧な境界線をはっきりとさせるための処理です。
たとえば、細かなオブジェクト領域が誤って分割される場合、モルフォロジカル処理を再度適用することで、領域補正を行える可能性があります。
また、境界領域を明示的に抽出してから、色の補正やテクスチャの統一を図ると、視覚的な違和感が減少します。
処理の順序としては、まず分割後の領域を走査し、すぐに隣接する領域との差異を評価する手法が採用されることが多いです。
領域間の類似性が高い部分を結合することで、より自然な仕上がりになるケースが多く見られます。
出力結果の最適化
分割処理後の最適化は、各領域が希望通りの境界を持っているかを確認する重要なポイントです。
セグメントの色や形状の不整合があれば、補正処理を組み合わせます。
たとえば、OpenCVの輪郭抽出関数を利用して、各領域の輪郭を描画したり、フィルタ処理で丸みを加えるなどの工夫が可能です。
調整の結果、画像全体のバランスが良い仕上がりになるか、処理速度や計算資源の面も考慮しながら、適切にパラメータのチューニングを行うように心がけましょう。
K-meansクラスタリングによる画像分割の詳細
K-meansクラスタリングは、画像内の各ピクセルの色や輝度をクラスタリングする手法です。
統計的な手法でクラスタを形成するため、画像内の色の密集度に応じた分割が可能となります。
ここでは、クラスタリング設定と距離計算、分割結果の評価に関する内容を詳しく説明します。
クラスタリング設定と距離計算
クラスタリングでは、Kの値を適切に設定することが重要です。
画像の内容に合わせてクラスタ数を調整する必要があります。
また、各ピクセル間の距離をどのように計算するかは結果に大きな影響を与えるため、色空間の変更や特徴の抽出方法が鍵となります。
色空間変換と特徴抽出
RGBだけでなく、HSVやLab色空間への変換を行うことで、色の違いが強調される場合があります。
これにより、クラスタ間の距離計算がより正確に行える利点があります。
たとえば、cvtColorを使ってRGBからLabに変換し、各ピクセルの輝度や彩度を考慮する方法が一般的です。
下記のサンプルコードでは、K-meansクラスタリングの前処理として色空間変換を実装しています。
#include <opencv2/opencv.hpp>
#include <iostream>
using namespace cv;
using namespace std;
int main() {
// カラー画像の読み込み
Mat src = imread("sample_color.jpg");
if (src.empty()) {
cout << "画像が読み込めません" << endl;
return -1;
}
// RGBからLab色空間への変換
Mat lab;
cvtColor(src, lab, COLOR_BGR2Lab);
// 画像を2次元配列に変換(各ピクセルの値をフラットにする)
Mat reshaped = lab.reshape(1, src.rows * src.cols);
reshaped.convertTo(reshaped, CV_32F);
// K-meansクラスタリングの実行
int clusterCount = 3; // クラスタ数の設定
Mat labels, centers;
kmeans(reshaped, clusterCount, labels, TermCriteria(TermCriteria::EPS + TermCriteria::COUNT, 10, 1.0), 3, KMEANS_PP_CENTERS, centers);
// 結果の再構築と表示
Mat clustered(src.size(), src.type());
int index = 0;
for (int i = 0; i < src.rows; i++) {
for (int j = 0; j < src.cols; j++) {
int clusterIdx = labels.at<int>(index, 0);
Vec3f center = centers.at<Vec3f>(clusterIdx);
clustered.at<Vec3b>(i, j) = Vec3b(center[0], center[1], center[2]);
index++;
}
}
imshow("オリジナル画像", src);
imshow("K-meansクラスタリング結果", clustered);
waitKey(0);
return 0;
}3つのウィンドウで「オリジナル画像」と「K-meansクラスタリング結果」が表示されます。
各領域に均一な色のグループが形成され、画像内の特徴が浮かび上がります。
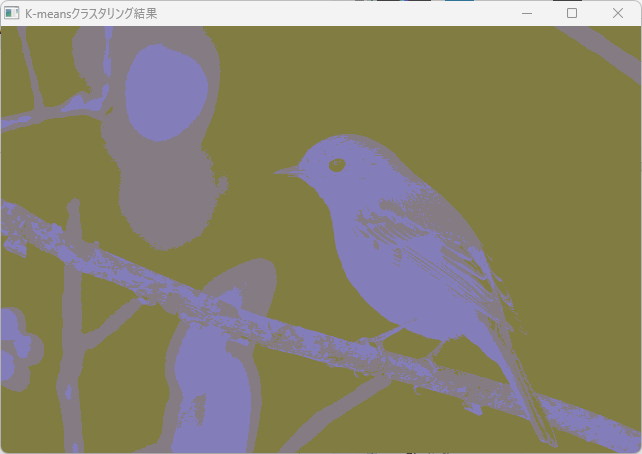
このサンプルコードでは、Kの値を3に設定して試行する例になっており、画像の色分布に合わせてクラスタ数の変更を検討することが必要です。
各クラスタの中心距離が結果にどのように反映されるかを観察すると、より効果的な分割が実現しやすくなります。
最適クラスタ数の検討
最適なクラスタ数は、画像の内容や分割目的に応じて変わるため、シミュレーション的な検討が必要です。
エルボー法などを利用して、各クラスタ数での誤差平方和を計算しながら、しっくりくる数字を見つけるアプローチがよく利用されます。
実際の実装では、パラメータを微調整しながら、ユーザーの意図に沿った分割結果が得られるようにする工夫が求められます。
分割結果の評価
分割結果を評価する手法として、視覚的な比較や定量的な指標を用いる方法があります。
各クラスタごとの統計情報を表としてまとめたうえで、分割の精度やエッジの滑らかさ、領域の統一感を確認すると良いでしょう。
結果の視覚化と比較指標
結果の視覚化は、分割された各クラスタに異なる色を割り当てることで、全体のバランスをひと目で確認できるメリットがあります。
さらに、各領域の面積、形状や色の一貫性などを数値化することで、比較指標として利用することができます。
以下は、その検証段階で参考となるリストです。
- セグメント毎の面積分布
- 各クラスタの色平均と分散
- 領域間のエッジの連続性
これらの指標を基に、改善点を見出し、アルゴリズムのパラメータを再調整する作業を積み重ねると良いでしょう。
パラメータ変更の影響検証
クラスタ数、距離計算方法、初期化方法などのパラメータ変更が分割結果に与える影響について、複数のパターンを比較する手法が役立ちます。
各パラメータの変更が結果にどのような影響を及ぼすか、グラフ化や表形式で記録することで、最適な設定を見出す助けとなります。
さまざまな実験結果を蓄積し、利用ケースに合わせたパラメータの組み合わせを検討してみてください。
GrabCutアルゴリズムによる前景抽出の詳細
GrabCutアルゴリズムは、画像内から前景を精密に抽出するための手法として用いられます。
エネルギー最小化問題に基づき、画像の前景と背景を効果的に分離する処理手法として広く利用されています。
ここでは、初期領域指定から反復処理、結果調整までを解説します。
初期領域指定と反復処理
GrabCutの初期設定は、ユーザーが前景領域と背景領域を大まかに指定するところから始まります。
矩形領域を指定することで、アルゴリズムは与えられた情報を元に前景と背景の区分を行います。
その後、確率モデルを用いた反復処理により、より正確な前景抽出が可能になります。
前景・背景分離の考慮点
ユーザーが指定した初期領域は、後の反復処理の精度に大きく影響するため、十分に注意する必要があります。
指定された矩形内に前景の要素がほとんど含まれるようにし、背景が混ざらないような調整が求められます。
自動的な前処理と組み合わせると、誤差が減少し、前景抽出がスムーズに実施されることが期待できます。
反復処理による精度向上策
アルゴリズムは、反復処理を経由して前景と背景の境界を徐々に明確にしていく仕組みとなります。
初期の単純な区分から、各ピクセルの確率が更新されるにつれ、前景の輪郭が精密化されます。
各反復で得られるマスク画像を観察し、必要に応じてパラメータの再調整を試みると、より高い精度が実現できます。
以下はGrabCutを用いた前景抽出のサンプルコードです。
#include <iostream>
#include <opencv2/opencv.hpp>
using namespace cv;
using namespace std;
int main() {
// カラー画像の読み込み
Mat src = imread("sample_object.jpg");
if (src.empty()) {
cout << "画像が読み込めません" << endl;
return -1;
}
// マスクの初期化
Mat mask;
mask.create(src.size(), CV_8UC1);
mask.setTo(Scalar::all(0));
// 初期矩形領域の指定(前景を含む範囲)
Rect rect(50, 50, src.cols - 100, src.rows - 100);
// GrabCutアルゴリズム実行用の背景・前景モデル
Mat bgdModel, fgdModel;
grabCut(src, mask, rect, bgdModel, fgdModel, 5, GC_INIT_WITH_RECT);
// マスクの調整(確実に前景部分を抽出)
compare(mask, GC_PR_FGD, mask, CMP_EQ);
// 前景抽出の結果作成
Mat foreground(src.size(), CV_8UC3, Scalar(255, 255, 255));
src.copyTo(foreground, mask);
imshow("抽出結果", foreground);
waitKey(0);
return 0;
}
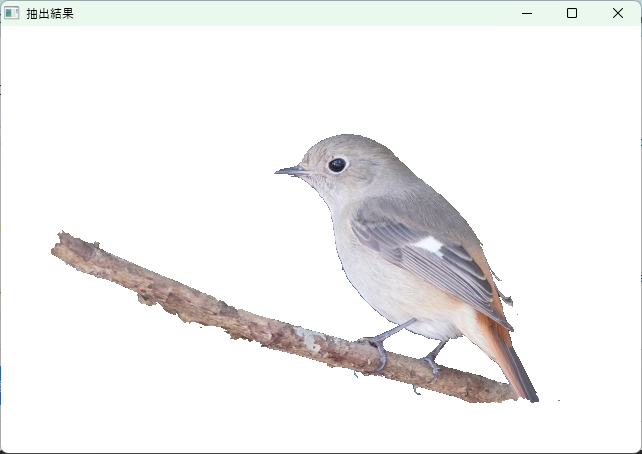
このコードは、GrabCutの特徴を活かして前景部分の抽出を行う例となります。
ユーザー指定が重要なステップで、初期矩形を適切に設定することで、反復処理による精度向上が期待できます。
結果調整と微調整のポイント
前景抽出後も、細かな調整を施すことで、境界や輪郭をさらに洗練させることが出来ります。
具体的には、境界線の補正や、パラメータの再設定によって処理結果をよりクリアな形に仕上げる取り組みが行われる。
境界補正手法
前景抽出の際、境界部分でちらつきやノイズが発生しやすいため、画像処理フィルタやモルフォロジカル操作を用いて補正する手法が採用されます。
dilateやerodeを組み合わせ、境界を滑らかにする処理を加えると、前景の輪郭がより自然に表現されます。
各フィルタのカーネルサイズや反復回数を調整しながら、最適な出力結果が得られるよう工夫することが大切です。
パラメータ最適化の留意点
GrabCutにおける初期設定、反復回数、モデルの更新パラメータなどは、画像ごとに最適な値が変わるため、実験的に検討する必要があります。
処理速度やメモリ使用量とともに、前景抽出の精度が調整できるよう、パラメータごとに詳細な検証をおこなうと良いです。
結果の再現性を確保するため、各パラメータの値と処理結果を記録し、後の改良に役立てると効果的です。
各手法の特徴と比較分析
複数の画像分割手法を比較する際、各アルゴリズムの強みや制約、利用シーンに合わせた選択ポイントを明示することが役立ちます。
さらに、パフォーマンスや処理速度を定量的に検証すれば、実環境での応用がより見通しやすくなります。
手法ごとの強みと制約
各手法の特徴を把握するためには、まず利用シーンに合わせた選択基準を整理する必要があります。
利用シーン別の選択基準
- Watershedアルゴリズム
- 複雑な背景でも各領域の境界が明瞭になりやすい
- 細かいオブジェクトの切り出しに向いている
- K-meansクラスタリング
- 画像全体の色相や輝度の分布を反映できる
- 統計的な解析に基づく分割が可能
- GrabCutアルゴリズム
- 前景抽出に最適で、ユーザー指定が効果的に活用できる
- 反復処理による精度向上が期待される
各シーンに合わせて、求める分割の精度や処理速度などを考慮すると、最適なアルゴリズムが選びやすくなるでしょう。
実装上の留意点
どの手法でも、パラメータ設定と前処理の方法が結果に大きく影響するため、慎重な調整が必要です。
各アルゴリズムは、画像の特性に合わせて適用しなければならず、試行錯誤を重ねながら、パラメータを経験的に最適化する手法が一般的です。
処理過程で生じるエラーや差異について、ログ出力やデバッグ機能を活用することが推奨されます。
パフォーマンスと処理速度
実環境での応用を考えるなら、計算負荷や処理速度は重要な指標になります。
各アルゴリズムの計算コストを比較検討することで、効率的な画像処理パイプラインの構築に役立ちます。
計算負荷の比較
- Watershedアルゴリズム
前処理にかなりのリソースが必要な場合があり、特に高解像度画像に対しては計算時間が長くなる傾向があります。
- K-meansクラスタリング
クラスタ数に依存し、一般的には比較的高速に計算できるものの、初期データの整備が求められるため、前処理が重要です。
- GrabCutアルゴリズム
反復処理による最適化段階が計算負荷を増加させるケースがあり、ユーザー指定の初期設定による影響も大きくなります。
各手法の計算負荷や高速化のテクニックを踏まえ、実行環境に合わせたアルゴリズム選択が必要です。
精度評価と品質検証
評価手法として、セグメントごとの精度やエッジの滑らかさ、領域の一貫性などを指標に取り、定量的な評価を行うと良いです。
特に、実際の画像データに対して複数のアルゴリズムを適用し、その結果をグラフや表としてまとめると、視覚的にも定量的にも評価が可能となります。
各手法のパラメータと処理結果の関係性を把握することで、将来的な最適化の方針を決定しやすくなります。
エラー対応と最適化の留意点
実装時に発生する各種エラーへの対応や、処理の効率化は、画像分割ソリューションの品質向上に不可欠なプロセスです。
柔軟なエラー検知と迅速な対策の実施、ならびに最適化の工夫をこまめに行うことで、安定したシステム構築が実現できます。
よくある問題と対策
実装段階でよく見受けられる問題の一つに、マーカー設定の誤動作が挙げられます。
また、K-means分割ではクラスタの異常なグループ化が発生するケースもあります。
これらの問題に対しては、各アルゴリズムの挙動を細かくログ出力し、エラー原因を特定する工夫が求められます。
マーカー設定の不具合改善
前処理とマーカー生成の段階で、意図通りのマーカーが抽出されない場合、モルフォロジカル処理や距離変換のパラメータを再調整することが推奨されます。
各種フィルタのカーネルサイズや、二値化の閾値を柔軟に変更しながら、最適な結果に近づけるアプローチが役立ちます。
異常なクラスタ分割への対応
K-means分割における異常なクラスタリングが発生した場合、初期化方法の工夫やクラスタ数の見直し、そして距離計算の方法を工夫することで改善が可能です。
複数の試行結果を比較しながら、最も自然な分割結果が得られるパラメータを見つける努力が必要です。
実装効率向上の工夫
大規模な画像処理パイプラインを構築する際は、処理速度や再現性の確保が非常に大切になります。
効率的な実装方法や、並列処理、キャッシング戦略などを導入することで、パフォーマンスの向上が期待できるでしょう。
処理速度の最適化方法
- 並列処理の導入:OpenCVの
parallel_for_関数や、C++標準のマルチスレッド機能を利用して、画像データの分割処理を高速化する工夫が考えられます - キャッシュの活用:前処理結果や中間計算結果をキャッシュすることで、再計算を防ぎ、全体の処理速度を向上させることができます
再現性の確保策
研究や開発の過程で、同じ画像に対して一貫した結果が得られるよう、各種乱数シードの固定や、パラメータの記録、バージョン管理を徹底する取り組みが求められます。
これにより、アルゴリズムの安定性と信頼性が向上し、長期的な開発にも役立ちます。
まとめ
ここまで、Watershed、K-means、GrabCutの各手法について、一連の処理の流れや注意するポイント、そして各アルゴリズムの特徴比較についてやわらかい文体で説明しました。
各手法ごとに前処理、マーカー設定、分割処理、後処理の工夫を取り入れることで、精度と効率を共に高めることが可能となります。
エラー対応や最適化の工夫は、実際の運用環境に合わせ柔軟に必要な変更を加えると良いです。
今回の内容が画像分割の理解や実装の一助になれば嬉しく思います。