[C++] OpenCVを活用したディープフェイク検出システムの設計と実装
C++とOpenCVを組み合わせることで、画像や動画内の顔を自動で検出し、特徴量を抽出してディープラーニングモデルにより偽画像の疑いを判断できる仕組みが実現できます。
素早い処理によってリアルタイムな検出も可能で、実用性と柔軟性の高い手法といえます。
システム設計
処理フローの全体像
入力データの取得
画像や動画ファイルからの入力は、システムの最初のステップになります。
利用するデータは、リアルタイムキャプチャや保存済みファイルのどちらにも対応できるように工夫してあります。
デバイスやファイルパスによって入力方法が変わるため、柔軟に対応できる設計になっています。
画像前処理と補正
入力画像は、照明の不均一さやノイズが含まれている場合があるので、前処理を行ってデータの品質を向上させます。
具体的な処理内容は以下のような流れです。
- グレースケール変換:色情報を単純化して処理速度も向上させます
- ヒストグラム均等化:明暗のコントラストを最適化し、顔検出の精度を高めます
- ノイズ除去:Gaussian Blurなどでノイズを抑える工夫を実施します
これらの前処理により、後続の顔検出や特徴抽出の効率が向上します。
顔検出と領域抽出
画像内の顔情報を正確に抽出することは、ディープフェイクの検出にとって非常に重要です。
OpenCVのカスケード分類器やDNNモジュールを利用して顔領域を特定し、検出した領域から必要なデータを切り出します。
顔検出では、縦横比や解像度の違いに配慮しながら正確な矩形領域を取得する工夫を続けています。
コンポーネントの構成
モジュール間の連携
システム全体は、以下の主要なモジュールに分割されます。
- 入力モジュール:各種入力データの取得、キャプチャを担当
- 前処理モジュール:画像の補正やノイズ除去を実施
- 顔検出モジュール:顔領域の検出と抽出を担当
- 検出エンジン:ディープフェイクの検出ロジックや学習済みモデルを用いて解析
各モジュールは、インターフェースの統一やAPIの規約に従い、データ交換が円滑に行えるように設計しています。
関連データはメモリ内で共有されることが多く、効率の良い通信方法やシンプルなフォーマットで扱っています。
データパイプラインの最適化
システムの処理速度向上とメモリの効率的活用を目指し、次の最適化手法を取り入れています。
- 並列処理:マルチスレッドを利用し、複数のフレームや画像を同時に処理
- バッチ処理:複数画像の入力を一括処理することで、オーバーヘッドの軽減を実現
- キャッシュ機構:頻繁に利用する中間データをキャッシュし、再計算を減らす
これにより、リアルタイム処理もスムーズに行える設計になっております。
ディープフェイク検出技術
OpenCVを用いた画像解析
カスケード分類器の活用
OpenCVのカスケード分類器は、軽量かつ高速な顔検出手法として広く使われている手法です。
対象画像のグレースケール化を前提に、特徴量を抽出して正面顔や角度の付いた顔も検出できるように訓練済みの分類器を利用します。
カスケード分類器の利用にはカスケードファイルが必要です。
OpenCVをインストールすると、多くの環境ではhaarcascade_frontalface_default.xmlファイルが自動的に含まれています。以下のようなパスに存在することが多いです。
/usr/share/opencv4/haarcascades/haarcascade_frontalface_default.xmlopencv\sources\data\haarcascades\haarcascade_frontalface_default.xmlカスケードファイルをコピーしてカレントディレクトリに配置するなどをして、使える状態にしておきましょう。
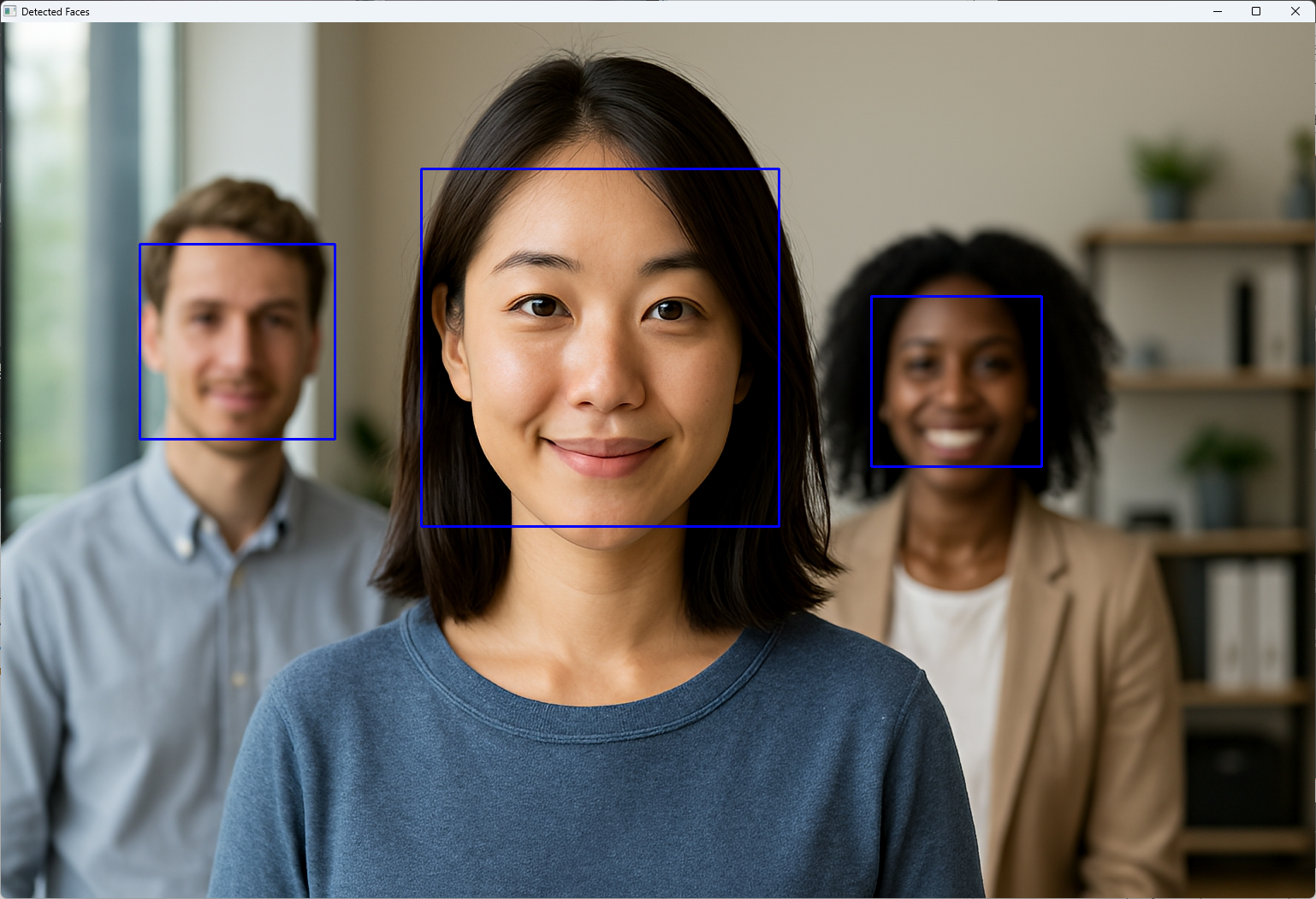
以下のサンプルコードは、カスケード分類器を用いて画像から顔を検出する例です。
#include <opencv2/opencv.hpp>
#include <iostream>
using namespace cv;
using namespace std;
int main(){
// 顔検出用カスケード分類器の初期化
CascadeClassifier faceCascade;
if (!faceCascade.load("haarcascade_frontalface_default.xml")){
cerr << "顔分類器を読み込めませんでした。\n";
return -1;
}
// 入力画像を読み込む
Mat image = imread("sample.jpg");
if(image.empty()){
cerr << "画像を読み込めませんでした。\n";
return -1;
}
// 画像をグレースケールに変換
Mat gray;
cvtColor(image, gray, COLOR_BGR2GRAY);
// 顔領域を検出する
vector<Rect> faces;
faceCascade.detectMultiScale(gray, faces, 1.1, 3, 0, Size(30, 30));
// 検出された顔領域に矩形を描画する
for(auto face : faces){
rectangle(image, face, Scalar(255,0,0), 2);
}
// 結果を表示する
imshow("Detected Faces", image);
waitKey(0);
return 0;
}
特徴量抽出は、顔画像からディープラーニングへの入力となるデータを取り出す重要な処理です。
カスケード分類器によって抽出された顔領域から、さらに細かい特徴が得られるように補正や拡大処理が追加される場合もあります。
特徴量抽出手法の選定
顔検出後に、ディープフェイクの有無を判定するための特徴量を抽出する必要があり、
以下のような手法が検討されます。
- HOG(Histogram of Oriented Gradients):エッジや形状情報を効果的に抽出
- LBP(Local Binary Patterns):テクスチャのパターンを解析して表情やシワなどの特徴を取得
これらの手法は、後続の機械学習モデルがディープフェイクの微妙な違いを識別するための基盤として利用されます。
最適な特徴量抽出手法は、検出精度と計算負荷のバランスを見ながら選定する工夫がされています。
ディープラーニングモデルの統合
ネットワーク構造の選定
ディープフェイク検出には、CNN(Convolutional Neural Network)などのネットワーク構造がよく利用されます。
ネットワーク選定の際には、以下の点が考慮されています。
- モデルの軽量性:リアルタイム処理向けに、軽量かつ高速な構造を採用します
- 精度の高さ:ディープフェイク特有のアーティファクト検出に適した層の配置やフィルターサイズを設計します
- 汎用性:複数の入力データ形式や解像度に対応できるようにします
また、OpenCVのDNNモジュールを活用して、事前学習済みのモデルをC++から利用するケースも多く、環境に応じて柔軟に対応できる実装が心がけられております。
モデルチューニングと最適化
学習済みのディープラーニングモデルを読み込み、実際の画像解析に適用する際には、パラメーターのチューニングが重要です。
たとえば、検出閾値やフィルターサイズ、層ごとの重みなどは、以下のような流れで調整されます。
- 検出結果と実際の画像を比較し、誤検出率を評価
- チューニングパラメータを調整するための反復テストを実施
- ベストなパフォーマンスが得られる組み合わせをシステムに反映
最適化のためには、パフォーマンスモニタリングを併用し、CPUやGPUの負荷分散を意識した実装が行われています。
実装手法
C++によるアーキテクチャ設計
オブジェクト指向設計の適用例
C++のオブジェクト指向の特性を活かし、システムはクラスごとに責務が分割されています。
たとえば、画像処理を担当する「ImageProcessor」クラスや、ディープフェイク検出ロジックを持つ「FakeDetector」クラスなど、
役割ごとにクラスを設計し、後から機能追加や修正がしやすい構造になっています。
この設計により、各クラス間は明確なインターフェースを持ち、モジュール間の独立性が保たれています。
モジュール分割と責務管理
システム全体の処理は、以下のようなモジュールに分割され、互いに連携しながら動作します。
- InputModule:入力データの取得と初期整形を担当
- PreProcessingModule:画像前処理と補正処理を実施
- FaceDetectionModule:顔検出と画像内領域の抽出を担当
- DeepFakeModule:ディープラーニングを用いてディープフェイクを探索
モジュール間は、データ構造(例えば、cv::Matなど)を通じて情報を交換し、責務の境界が明確になるように設計してあります。
この分割により、将来的な機能拡張やメンテナンスが容易に行える工夫が随所に散りばめられています。
エラーハンドリングとパフォーマンス改善
並列処理と非同期実行
処理の高速化には、C++のマルチスレッドや非同期実行の仕組みを活用しています。
複数のフレームや画像を同時並行して処理するために、std::threadやstd::asyncを利用し、CPU資源を効率的に使っています。
以下のサンプルコードは、マルチスレッドを使用してフレーム処理を並列に実行する例です。
#include <iostream>
#include <thread>
#include <vector>
using namespace std;
// 1フレームごとの処理を行う関数
void processFrame(int frameNumber){
// ここで各フレームの画像処理を実施する(シミュレーション)
cout << "フレーム " << frameNumber << " を処理中です\n";
}
int main(){
vector<thread> threads;
// 5つのフレームを並列処理する例
for(int i = 0; i < 5; i++){
threads.push_back(thread(processFrame, i));
}
// すべてのスレッドが終了するまで待機する
for(auto &t : threads){
t.join();
}
return 0;
}フレーム 0 を処理中です
フレーム 1 を処理中です
フレーム 2 を処理中です
フレーム 3 を処理中です
フレーム 4 を処理中です非同期実行により、顔検出と前処理、特徴量抽出が別々のスレッドで動作し、システム全体のスループット向上に寄与しています。
リソース管理の最適化
処理速度を犠牲にしないため、リソース管理は非常に重要なポイントです。
特に、メモリの動的確保や解放、画像データのキャッシュ機構、オブジェクトのライフサイクル管理などに細心の注意を払い、
スマートポインタやRAII(Resource Acquisition Is Initialization)の概念を取り入れて、安定した動作環境を実現しています。
また、GPU利用時のメモリ転送やバッファ管理も含め、全体的なパフォーマンス改善に力を入れています。
テストと検証
検出精度の評価
パラメーター調整と評価手法
ディープフェイク検出システムは、検出精度の向上が求められるため、
各パラメーターの調整を通じて最適な設定が決まっています。
具体的な評価手法としては、正例率・偽陽性率の評価、ROC曲線の作成、F1スコアの算出などがあります。
評価結果から得られたフィードバックをもとに、パラメーターが細かくチューニングされる仕組みがあります。
リアルタイム処理の検証
リアルタイムでのディープフェイク検出には、フレームレートと遅延の管理が欠かせません。
システム内の各モジュールは計測ツールで実行時間をモニタリングし、処理時間が一定時間以内に収まるかどうかが検証されます。
また、負荷テストを実施し、ピーク時のパフォーマンスを把握してボトルネックがあれば改善措置が講じられます。
自動テストの戦略
単体テストと統合テストの区分け
システムの各モジュールは、単体テストにより個別の機能が期待通りに動作するか検証しています。
テスト項目には、境界値テストやエラーケース、正常系のシナリオなどを含め、問題の早期発見と修正が可能な設計となっています。
- 単体テスト:各関数、クラスごとのテストコードを作成
- 統合テスト:モジュール間のデータ連携が正しく行われるか確認
テストケースの設計と実施
各テストケースは、入力データ、期待される出力、エラーメッセージなどを明確に定義し、
システム変更時に自動で実行される仕組みが構築されています。
CI/CDパイプラインを利用して、コード変更のたびにテストが実行される体制となっており、
安定性が高く信頼性のあるソフトウェア運用が実現されています。
トラブルシューティング
エラーメッセージ解析
ログ記録と解析手法
システム内で発生したエラーや異常動作の原因追求のため、
各モジュールは詳細なログを出力する仕組みを備えています。
ログファイルには、エラーメッセージや処理ステップ、時間情報などが記録され、
後から解析ツールを用いてエラーのパターンを抽出できるようになっています。
デバッグ手法の工夫
デバッグ作業を円滑に進めるために、ログ出力を詳細に設定し、
IDEのブレークポイントやステップ実行を活用するなど、柔軟な対応が可能な環境が整えられています。
不具合の再現手順や発生条件を洗い出すためのチェックリストが用意され、
問題の切り分けがしやすい工夫がなされています。
異常処理への対策
例外処理設計
プログラム内で発生するさまざまな例外に対して、一元的な例外処理の仕組みを導入しています。
try-catch文を効果的に用いることで、予期せぬエラー発生時の安全な終了や、エラー発生箇所の特定に努めています。
また、リソースの後始末をきちんと行い、システム全体の安定性を保つように設計されています。
ユーザー通知システムの設計
異常が発生した場面では、ユーザーに対して適切な通知やアラートが表示される仕組みが整っています。
エラーメッセージは分かりやすい言葉で構成され、必要に応じて推奨される対処法も併記される工夫がされています。
セキュリティ対策
データ保護とプライバシー対策
安全なデータ処理の実現方法
個人情報やセンシティブな画像データを扱うため、暗号化やアクセス制御などが実装されています。
データ送信時にはSSL/TLSなどのプロトコルを使用し、保管時には暗号化を行うことで、外部からの不正アクセスを防いでいます。
また、処理ログも暗号化され、安全な管理が徹底される設計がなされています。
アクセス制御と認証の実装
システムにアクセスできるユーザーごとに、役割と権限が明確に定義されます。
ログイン認証や多要素認証の仕組みが導入され、ユーザー情報は安全に管理されるようになっています。
アクセス権限の変更やセッション管理の厳密な実施により、不正利用を防止しています。
不正利用防止の仕組み
アラートシステムの設計
疑わしい動作や不正アクセスが検出された場合には、即座に管理者に通知される仕組みが整えられます。
リアルタイムでシステム内部のログ解析やアクセス履歴を監視し、異常があれば自動的にアラートを発する仕組みが動作します。
セキュリティ監視体制の構築
システム運用中は、定期的なセキュリティ監査が実施されます。
外部のセキュリティ専門家の意見を取り入れ、内部監視システムとの連携を図ることで、脆弱性が見つかった場合にも迅速に対応できる体制を整えています。
モデルの運用と拡張
定期更新とメンテナンス体制
モデル精度の定期評価
実装後も、運用中の検出精度の監視が欠かせないため、定期的に評価実験が行われる仕組みが採用されます。
フィードバックや最新のディープフェイク手法に合わせ、学習済みモデルの再調整が実施されます。
検出の正確性と応答速度を維持するために、評価データセットを用いたテストが定期的に実施されます。
更新プロセスの自動化
モデル更新の際に、人為的なエラーを防ぐため、自動化されたパイプラインが構築されます。
新しいアルゴリズムの導入やパラメータ更新が発生した場合でも、CI/CDツールを用いてスムーズに更新が反映されるようになっています。
このプロセスにより、常に最新の技術が適用される環境が保たれます。
システム拡張の可能性
新アルゴリズム統合の検討
ディープフェイク技術や検出手法は日々進化していくため、
将来的な新しいアルゴリズムや手法を統合できる設計が求められます。
モジュールごとのインターフェースが明確なため、新たな特徴抽出手法やディープラーニングモデルを容易に組み込めるようになっています。
他システムとの連携戦略
既存のセキュリティシステムや監視サービスと連携することで、
より広範なデータの統合と複合的な分析が可能にできます。
APIやミドルウェアを活用し、データ連携のプロトコルを統一することで、
多様なソースからの情報を集約し、全体の解析精度を向上させる戦略を導入しています。
まとめ
今回の記事では、C++とOpenCVを活用したディープフェイク検出システムの設計や実装方法を、システム全体の処理フローから個々の技術要素、エラーハンドリングやセキュリティ対策、そしてモデルの運用・拡張に至るまで、幅広く内容を解説しました。
各技術の特徴や工夫点に触れた内容が、システムの設計や実装の参考になれば嬉しいです。
エンジニア同士で知見を共有しながら、検出精度や処理速度の改善に日々取り組んでいくことが、より安全で信頼性の高いディープフェイク検出システムの実現につながると期待しています。