【C++】OpenCVを活用した画像直線検出アルゴリズムの実装手法
C++とOpenCVを利用して画像から直線を検出する手法です。
画像をグレースケール変換で前処理した後、Cannyエッジ検出で輪郭を抽出し、ハフ変換\( HoughLinesP \)で直線候補を選択する流れになります。
コード上では、cv::imreadで画像を取得し、cv::cvtColorやcv::Canny、cv::HoughLinesP、cv::lineを活用して直線を描画するため、シンプルかつ効果的に直線検出が実現できる点が特徴です。
技術背景と基本
C++とOpenCVの組み合わせの魅力
C++は高速な実行性能が特徴で、画像処理ライブラリとしてOpenCVを使うと柔軟かつ効率的な画像解析が可能になります。
OpenCVは豊富な機能を提供しており、シンプルなコードで複雑な画像処理が実現できるのが魅力です。
特にリアルタイムな画像解析や大規模なデータセットの処理に向いており、開発者の創造性が生かしやすい環境になっています。
画像直線検出の数学的基礎
画像内の直線を検出するためには、画像データを数学的に捉える必要があり、基礎となる理論がいくつか存在します。
画像は各画素の値が並んだ行列として表現でき、線形な特徴を抽出するための手法が数多く研究されています。
行列表現と画素値の関係
画像は行列として扱うことができ、各要素が画素値に対応します。
たとえば、カラー画像の場合はRGBの3チャネルそれぞれが行列の異なる層に格納される形で保存されます。
グレースケール画像では画素の明暗を示す数値がそのまま行列の要素になり、画像全体の情報を直感的に理解できるようになっています。
行列演算を駆使することで、画像全体に対するフィルタリングや変換処理が簡潔に記述できる点に魅力があります。
線形パターンの検出理論
画像内の直線検出は、画像内のエッジから直線という線形パターンを見出す問題です。
直線は、平面上の任意の点 \((x, y)\) に対して、\(\rho = x \cos\theta + y \sin\theta\) という方程式で表現できるため、エッジ検出後のデータからこのパラメーター空間でのピークを探す手法が有名です。
数学的な背景を応用することで、直線の候補を効率よく抽出することが可能になります。
画像前処理フェーズ
グレースケール変換の役割
画像解析において、グレースケール変換は非常に重要な役割を果たします。
カラー情報を簡略化することで、計算量が減り、エッジや局所的な明暗に注目できるようになります。
グレースケール画像に変換することで、Cannyエッジ検出などのアルゴリズムが効果的に動作するため、画像が一層処理しやすくなります。
ノイズ低減手法
画像には撮影条件やセンサーの特性によりさまざまなノイズが含まれることが多く、直線検出の精度を向上させるためにはノイズ除去が欠かせません。
ここではガウシアンフィルタとメディアンフィルタの特徴について紹介します。
ガウシアンフィルタの特徴
ガウシアンフィルタは、画像全体にわたって平滑化を行い、ノイズを抑えつつ自然なぼかしを実現するためのフィルタです。
画像の各画素が隣接する画素との加重平均をとる処理により、エッジの情報も適度に保持しつつ不要なノイズを取り除く効果があります。
以下の表にガウシアンフィルタとその他フィルタの特徴をまとめました。
- ノイズ除去効果:高い
- エッジ保持効果:適度
- 処理速度:中速
メディアンフィルタの適用例
メディアンフィルタは、各画素をその周辺の中央値で置き換える処理で、塩胡椒ノイズの除去に特に効果的です。
エッジ部分の急激な変化も滑らかにするため、直線検出前の前処理として使うと効果的な場合があります。
場合によってはガウシアンフィルタと組み合わせることで、より安定した前処理が可能になります。
エッジ検出のプロセス
Cannyエッジ検出手法の概要
Cannyエッジ検出は多段階の処理が組み合わさったエッジ抽出法のひとつで、最近傍のエッジを正確に検出する能力があります。
最初にグレースケール画像を基に、ノイズ除去を行い、強度の急激な変化部分に対してエッジを強調します。
設定された2つの閾値に基づいてエッジの有無が決定されるため、調整によって微妙なエッジも検出可能な柔軟性があります。
エッジ抽出パラメータの調整方法
Cannyエッジ検出では、低い閾値と高い閾値を適切に選択することが重要です。
一般的な設定では、低い閾値は50から100程度、高い閾値は150から200程度が使用されることが多いですが、画像の特性に合わせて実験的に調整する必要があります。
パラメータを微調整することで、細かいエッジと強いエッジのバランスをとることができます。
ノイズ対策とエッジ強調の工夫
エッジ検出を行う際、ノイズ除去前処理と組み合わせることで誤検出のリスクを下げる工夫が行われます。
また、エッジ検出後に二値化処理を施すことで、エッジ部分をより際立たせ、直線検出アルゴリズムへの入力として適した画像に仕上げることができます。
エッジ画像の最適化技法
エッジ画像の品質をさらに向上させるためには、取得したエッジ情報に対して追加の最適化を施すことが有効です。
細かいエッジの断片や不連続な箇所を整理することで、後続の直線抽出アルゴリズムがスムーズに動作するようになります。
境界強調による特徴抽出
境界強調フィルタを適用することで、エッジ部分の輝度差がさらに明確になります。
これにより、直線として認識されるべき部分が際立ち、累積配列上でのピーク検出などがより正確になります。
平滑化処理とのバランスをとりながら実施すると、不要なエッジノイズを効果的に抑えつつ、検出精度を向上させることができます。
直線抽出アルゴリズム
ハフ変換の理論と実践
ハフ変換は画像中のパラメトリックな形状、特に直線を検出するための手法です。
エッジ検出後の画像から直線を抽出する際に大変役立つ技法です。
累積配列と呼ばれる投票機構を利用して、直線に該当するパラメーターを見出す仕組みになっています。
標準ハフ変換の基本原理
标准のハフ変換では、画像内のエッジ点 \((x, y)\) に対して、直線のパラメータ \(\rho\) と \(\theta\) の対応関係を
\[\rho = x \cos\theta + y \sin\theta\]
という式で表現します。
各エッジ点が取りうる直線のパラメータを累積配列に投票することで、直線の候補が決定されます。
多数のエッジ点が同じパラメーターに投票する部分が直線として認識され、閾値を超えた部分が最終的な直線候補として抽出されます。
確率的ハフ変換との比較
標準のハフ変換は全エッジ点を対象に計算を行うため、計算量が多くなる場合があります。
そのため実際のアプリケーションでは、ランダムにサンプルを選び出す確率的ハフ変換が採用されることもあります。
確率的ハフ変換は計算コストを抑えながら、必要十分な直線検出が可能になるため、リアルタイム処理などに有利な場合が多いです。
サンプルコードを以下に示します。
サンプルコードでは、画像の読み込みからグレースケール変換、Cannyエッジ検出、確率的ハフ変換による直線検出、そして描画までを実装しています。
コメントや変数名は見やすさを考慮して日本語と英語がミックスされた形になっています。
#include <opencv2/opencv.hpp>
#include <iostream>
int main() {
// 画像の読み込み
cv::Mat image = cv::imread("sample.jpg");
if (image.empty()) {
std::cerr << "画像の読み込みに失敗しました。" << std::endl;
return -1;
}
// グレースケールに変換して前処理を行う
cv::Mat gray;
cv::cvtColor(image, gray, cv::COLOR_BGR2GRAY);
// Cannyエッジ検出を実施
cv::Mat edges;
cv::Canny(gray, edges, 50, 150, 3, true);
// 確率的ハフ変換で直線を検出する
std::vector<cv::Vec4i> lines;
cv::HoughLinesP(edges, lines, 1, CV_PI / 180, 100, 30, 10);
// 検出した直線を赤色で描画する
for (size_t i = 0; i < lines.size(); i++) {
cv::Vec4i l = lines[i];
cv::line(image, cv::Point(l[0], l[1]), cv::Point(l[2], l[3]), cv::Scalar(0, 0, 255), 2, 8);
}
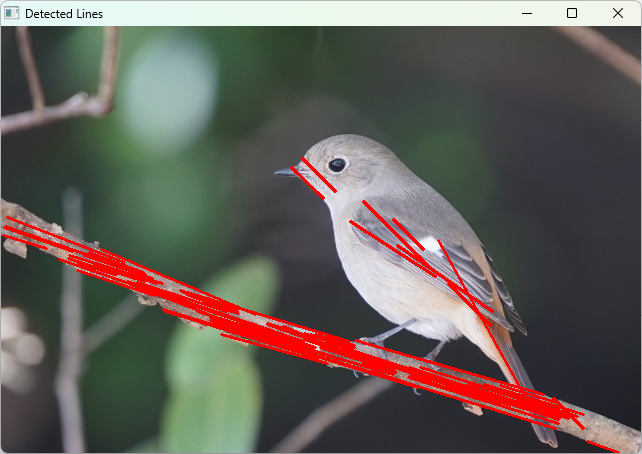
// 結果をウィンドウに表示する
cv::imshow("Detected Lines", image);
cv::waitKey(0);
return 0;
}表示されたウィンドウに直線が描画された画像が確認できます。
直線候補の選定と検証
直線検出後、得られた候補をさらに検証し、不要な直線を除去する処理が求められる場合があります。
エッジ検出の段階で生じた複数の検出結果をうまくまとめることで、より洗練された出力が期待できます。
累積配列による閾値設定
累積配列において、各パラメーター値に対する投票数をもとに直線の存在が判断されるため、適切な閾値設定が肝心となります。
閾値が高すぎると細かい直線が見逃され、低すぎるとノイズが増える傾向があるため、実際の画像特性に合わせた調整が大切です。
複数直線のフィルタリング手法
直線候補が重複していたり、近接する直線が複数出現する場合には、重複除去や統合などの処理を加えることが多いです。
例えば、検出された直線同士の角度や距離の類似性を評価し、統計的に代表的な直線を選び出す方法などが採られます。
これにより、最終的な出力の精度が向上します。
パラメータ最適化と精度向上
エッジ検出とハフ変換の連動調整
直線検出の精度を向上させるためには、エッジ検出とハフ変換のパラメータを連動して調整する工夫が必要です。
これにより、各プロセスでの誤検出や漏れを補完でき、より精度の高い直線検出が実現できます。
パラメータ間のバランス最適化
各アルゴリズムが持つパラメータ間の相互関係を意識しながら調整することで、エッジ部分の検出やハフ変換の累積配列によるピークの抽出が一層洗練されます。
たとえば、Cannyエッジ検出の閾値やハフ変換の投票数閾値を実際の画像に合わせて変更することが重要です。
誤検出防止のための工夫
ノイズや不要なエッジの誤検出を防ぐために、前処理段階での平滑化や後処理でのフィルタリングが活用されます。
経験的な調整やテストケースを通して、数値的な閾値を見直すなどの試行錯誤が求められます。
結果評価と改善策の検討
得られた検出結果に対して、客観的な評価を行い、改善点を洗い出すプロセスも欠かせません。
定量的な評価指標とともに、視覚的な確認も行いながら調整を重ねることが大切です。
精度検証手法の考察
各種評価指標として、直線の検出率や誤検出率、処理速度などが挙げられ、これらをもとにアルゴリズム全体のチューニングが図られます。
画像の特性や用途に合わせて、評価方法を柔軟に選択するのがポイントです。
テストケースによるパフォーマンス評価
複数のテストケースを用意することで、さまざまな状況下での動作確認が可能になります。
特に、交通画像や産業用画像のように特定のパターンが存在する場合、現実の環境に近い条件下での検証が求められ、結果に対するフィードバックがアルゴリズムの改善に直結します。
応用事例と拡張可能性
交通画像解析への活用例
画像から直線を検出する技術は交通分野でも幅広く使われており、その応用例として車線検出が挙げられます。
撮影された道路画像から車線の位置を抽出することで、運転支援システムや自動運転システムの基盤技術として活用できます。
車線検出への実装事例
車線検出の場合、道路の持つ直線的な特徴を抽出するため、前処理で天候やライティングの影響を受けにくい画像整形が求められます。
各画像において先述のグレースケール変換、ノイズ低減、エッジ検出を実施した後、ハフ変換により車線候補が選び出されます。
検出された車線は、運転支援システムにおける安全運転のサポートや衝突回避のアルゴリズムと連携する仕組みが考えられます。
動画解析での適用可能性
静止画像に限らず、動画フレームごとに直線検出をリアルタイムで行えることで、連続した車線情報の追跡が可能になります。
動画内の連続性を活かして、エッジ検出や直線候補の集計結果を時系列的に統合することで、より一貫性のある解析結果を提供することが期待されます。
産業検査分野での利用展開
製造現場や品質管理の分野でも、画像処理技術は大きな力を発揮します。
直線検出を活用することで、部品の形状確認や位置合わせなどの自動検査が実現可能となるため、ライン上での即時判定や不良品選別に役立ちます。
部品認識システムとの連携
製造工程では、部品の形状や配置が正確に把握されることが求められるため、画像から直線やエッジ情報を抽出し、部品の寸法や配列を検証するシステムが開発されます。
検出結果をもとに、既定のパターンと照らし合わせることで異常な製品を速やかに識別できる仕組みが現場に導入されています。
自動検査への応用シナリオ
自動化された検査ラインでは、画像解析の結果をリアルタイムに反映し、不良品の発見や製品の不整合検出に直結するシステムが求められます。
直線検出により抽出された情報は、他の画像解析手法と組み合わせることで、より正確な検査結果を提供し、生産性向上や品質管理の強化に貢献します。
まとめ
今回紹介した内容を通して、C++とOpenCVを組み合わせた画像直線検出のための基礎技術や前処理、エッジ検出、そして直線抽出アルゴリズムの流れについて詳しく解説しました。
各プロセスで求められるパラメータ調整や前処理、そしてノイズ対策の工夫が結果に大きく影響するため、現場でのテストや評価を重ねることでさらに精度を向上させることが期待できます。
各分野への応用例から、交通安全支援や産業検査分野での実用例が示すように、柔軟な技術展開が可能な点が魅力的です。