【C++】OpenCVで実現するテクスチャ解析技術:エッジ検出と特徴量抽出で捉える画像の質感
C++とOpenCVを組み合わせることで、画像内のテクスチャ特徴を柔軟かつ高精度に抽出できるため、エッジ検出や特徴量抽出を用いたパターン認識が実現できます。
C++の高速処理とOpenCVの充実した画像処理機能により、リアルタイム解析が可能で、幅広い用途に対応できる点が魅力です。
画像前処理のアプローチ
前処理は、後続の解析の精度に大きく影響するため、画像を扱う際に欠かせない工程です。
ここでは、画像の色空間変換やノイズ除去フィルタの利用方法について柔らかく説明するので、参考にしてもらえると嬉しいです。
色空間変換
画像の色空間変換は、画像解析の前に効率的な処理を行うために用いられる手法です。
処理する前に画像の情報を適切な形式に変換することで、解析工程がスムーズに進むので、よく活用されます。
BGRからGrayへの変換
OpenCVで読み込んだ画像は通常、BGR形式で保存されていますが、テクスチャ解析では輝度情報だけに注目する場合が多いため、グレースケール画像への変換が簡単かつ効果的な手法です。
以下のサンプルコードでは、BGR画像をグレースケール画像に変換する方法を示しています。
#include <opencv2/opencv.hpp>
#include <iostream>
int main() {
// 入力画像を読み込む
cv::Mat inputImage = cv::imread("input.jpg");
// 画像が正しく読み込まれたか確認する
if(inputImage.empty()){
std::cerr << "画像が読み込めませんでした" << std::endl;
return -1;
}
// グレースケール画像用のMatオブジェクトを用意する
cv::Mat grayImage;
// BGRからGrayへの変換を実施する
cv::cvtColor(inputImage, grayImage, cv::COLOR_BGR2GRAY);
// 変換した画像を保存する
cv::imwrite("gray_output.jpg", grayImage);
// 結果を画面に表示する
cv::imshow("Gray Image", grayImage);
cv::waitKey(0);
return 0;
}
この方法は、画像の輝度情報にフォーカスする場合に有効で、彩度や色相といった情報が不要な場合に利用されます。
変換のメリットとデメリット
色空間の変換について考えると、以下のようなメリットとデメリットが挙げられます。
- メリット
- 処理するデータ量が減るため、計算コストが低くなる
- 輝度情報に特化した解析がしやすくなる
- デメリット
- 色に関する情報が失われるため、色情報が重要な場合には不向き
画像ごとの解析目的に応じて、変換するか否かを判断する必要があります。
ノイズ除去フィルタ
画像には撮影時のノイズが含まれていることが多く、ノイズ除去は解析の前提として重要な工程です。
ノイズが多いと、後続のエッジ検出や特徴量抽出で誤検出が発生する可能性があるため、前処理としてしっかりと行いたい処理となります。
平滑化フィルタの種類
平滑化フィルタにはいくつかのタイプがあり、それぞれ用途や特性が異なります。
主な種類は次のとおりです。
- 平均フィルタ
- ガウシアンフィルタ
- メディアンフィルタ
画像の性質や目的に合わせて、適切なフィルタを選択すると良いでしょう。
平均フィルタ
平均フィルタは周囲の画素の平均値を求めることで、画像全体のノイズを低減する手法です。
計算が単純なため、処理が速いのが特徴ですが、エッジ部分がぼやける可能性がある点に注意が必要です。
ガウシアンフィルタ
ガウシアンフィルタは、ガウス分布に基づいた重み付けで平滑化を行います。
平均フィルタよりも自然な平滑化が可能で、エッジの情報がある程度保たれるため、応用範囲が広いです。
以下はガウシアンフィルタを使用するサンプルコードになります。
#include <opencv2/opencv.hpp>
#include <iostream>
int main() {
// 入力画像を読み込む
cv::Mat inputImage = cv::imread("input.jpg");
if(inputImage.empty()){
std::cerr << "画像の読み込みに失敗しました" << std::endl;
return -1;
}
cv::Mat blurredImage;
// ガウシアンフィルタを用いて画像を平滑化する
// カーネルサイズ(5,5)と標準偏差を指定している例です
cv::GaussianBlur(inputImage, blurredImage, cv::Size(5,5), 1.5);
cv::imwrite("gaussian_output.jpg", blurredImage);
cv::imshow("Gaussian Blurred", blurredImage);
cv::waitKey(0);
return 0;
}
メディアンフィルタ
メディアンフィルタは、ノイズ除去において効果的な手法の一つです。
各画素周辺の中央値を求めるため、塩胡椒ノイズ(スパイクノイズ)に対して非常に有効です。
一方で、エッジが多少保持されるものの、処理にややコストがかかる場合があるので、画像の状態に応じて使い分けが推奨されます。
フィルタ選択の基準
画像処理に使うフィルタの選択は、以下の点を考慮するとよいです。
- ノイズの種類と分布
- エッジの保持が必要かどうか
- 処理速度の要求
これらを比較検討して、最適なフィルタを選択することが重要です。
エッジ検出手法
エッジ検出は、画像内の急激な輝度変化を検出する処理で、物体の輪郭や構造の情報を抽出するために使用されます。
各手法ごとにアルゴリズムの背景や特徴、適用時の注意点が異なるため、目的に合わせた選定が求められます。
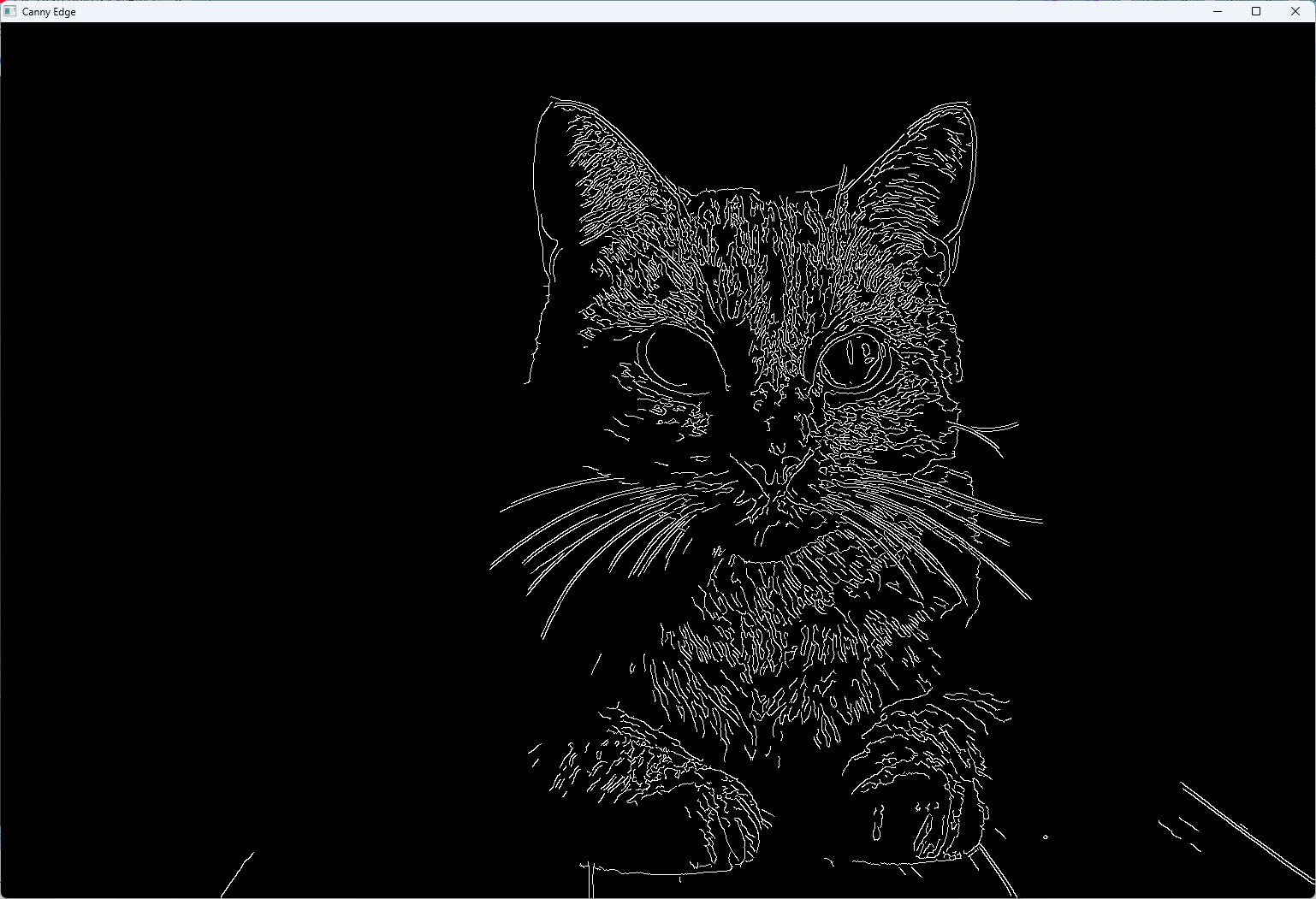
Cannyエッジ検出
Cannyエッジ検出は、複数の処理段階を経てエッジを検出する信頼性の高い手法です。
アルゴリズムの原理
Canny法は、ノイズ除去、勾配計算、非最大抑制、二重閾値処理、ヒステリシス処理といった段階を順に実行します。
特に、二重閾値とヒステリシスを用いることで、弱いエッジと強いエッジを区別し、真正のエッジを取りこぼさない工夫がされています。
数式としては、エッジの勾配を表すために次のような式を用いる場合があります。
\[G = \sqrt{G_x^2 + G_y^2}\]
ここで、\(G_x\)および\(G_y\)はそれぞれx軸とy軸方向の微分結果を表します。
パラメータの調整方法
Canny法のパラメータとして主に二つの閾値を設定する必要があり、適切な値を選ぶことでエッジ検出の精度が向上します。
画像や目的に応じて、低い閾値と高い閾値を調整することが大切です。
パラメータの設定は経験値や試行錯誤に基づくことが多いため、検証を重ねることをお勧めします。
以下はCannyエッジ検出を実装するサンプルコードです。
#include <opencv2/opencv.hpp>
#include <iostream>
int main() {
cv::Mat inputImage = cv::imread("input.jpg");
if(inputImage.empty()){
std::cerr << "画像の読み込みに失敗しました" << std::endl;
return -1;
}
cv::Mat grayImage, edgeImage;
// グレースケール変換
cv::cvtColor(inputImage, grayImage, cv::COLOR_BGR2GRAY);
// ノイズ除去のためにガウシアン平滑化を実施
cv::GaussianBlur(grayImage, grayImage, cv::Size(5,5), 1.5);
// Cannyエッジ検出を適用(閾値50と100を採用)
cv::Canny(grayImage, edgeImage, 50, 100);
cv::imwrite("canny_output.jpg", edgeImage);
cv::imshow("Canny Edge", edgeImage);
cv::waitKey(0);
return 0;
}
Sobelフィルター利用
Sobelフィルターは、画像のエッジ部分を抽出するための微分演算を行う手法です。
微分演算の役割
Sobelフィルターは、画像の各画素に対してx軸およびy軸方向の微分を計算するため、エッジの方向や強度を表す勾配画像が得られます。
この結果、急激な輝度変化を示す部分が強調される効果があります。
計算方法は以下のようなカーネルを用いた畳み込みで実施されます。
- x方向カーネル : \([-1, 0, 1]\)
- y方向カーネル : \([[ -1 ], [ 0 ], [ 1 ]]\)
実装時の注意点
Sobel法は微分の強度を数値として扱うため、ノイズがあると誤検出が発生する可能性があるため、前処理でノイズ除去する工程を忘れずに入れる必要がです。
さらに、勾配の大きさの計算が必要なため、計算結果の正規化や型変換も適切に実施するとよいです。
Laplacian法活用
Laplacian法は、第二次微分を計算して画像の急激な変化を捉える手法です。
第二次微分の効果
Laplacian法は、画像全体の輝度勾配の変化を利用してエッジを浮かび上がらせます。
二次微分により、エッジの位置が0付近となる特徴を活かすため、エッジ部位がより明瞭に抽出される傾向があります。
なお、二次微分によってノイズも強調されるため、適切に平滑化処理をあらかじめ行う必要があります。
適用条件の検討
Laplacian法は、単一の処理でエッジを抽出できる手法であるため、シンプルなアルゴリズムが求められる場合に向いています。
ただし、エッジの細かい制御が難しいため、他の手法との組み合わせで使うと効果的な場合も多く、画像の性質によっては事前の平滑化が必須となります。
特徴量抽出手法
画像の中の特徴点や興味深いパターンを効率的に捉えることができる特徴量抽出は、物体認識やマッチングなどの用途で多用されます。
ここでは、検出した特徴点がスケールや回転に対して頑健な手法について解説するので、実装の参考になれば嬉しいです。
SIFTの運用
SIFTは、局所特徴点の検出と記述において広く知られている手法で、さまざまなスケールに対応できるという特徴があります。
特徴点検出の原理
SIFTは、画像のスケール空間において極大値や極小値を検出することで特徴点を抽出します。
各特徴点には、その周辺の輝度情報を基に記述子が割り当てられ、回転やスケール変化に対する不変性が確保されます。
こういった仕組みにより、部分的な画像の変化があっても同一の特徴点を対応付けることが可能となっています。
スケールと回転不変性
SIFTの大きな特長として、画像の回転や拡大・縮小に対して頑健な結果が得られる点が挙げられます。
これは、検出過程で特徴点ごとの主方向が求められ、その方向に合わせた記述が行われることで実現される仕組みです。
以下は、SIFTを使って特徴点を抽出するサンプルコードになります。
#include <opencv2/opencv.hpp>
#include <opencv2/xfeatures2d.hpp>
#include <iostream>
int main() {
cv::Mat inputImage = cv::imread("input.jpg", cv::IMREAD_GRAYSCALE);
if(inputImage.empty()){
std::cerr << "画像の読み込みに失敗しました" << std::endl;
return -1;
}
// SIFTアルゴリズムのインスタンスを作成(特徴点検出と記述子計算)
cv::Ptr<cv::SIFT> siftDetector = cv::SIFT::create();
std::vector<cv::KeyPoint> keypoints;
cv::Mat descriptors;
// 特徴点検出と記述子計算を実施
siftDetector->detectAndCompute(inputImage, cv::noArray(), keypoints, descriptors);
// 特徴点を描画し、結果を出力する
cv::Mat outputImage;
cv::drawKeypoints(inputImage, keypoints, outputImage, cv::Scalar::all(-1), cv::DrawMatchesFlags::DEFAULT);
cv::imwrite("sift_output.jpg", outputImage);
cv::imshow("SIFT Features", outputImage);
cv::waitKey(0);
return 0;
}(プログラム実行後、SIFTで検出された特徴点が描画された画像が表示され、「sift_output.jpg」として保存される)この手法は、画像同士のマッチングや物体認識の際に非常に有用で、各特徴点が詳細な情報を持っているため、後続の解析処理に大いに役立つ仕組みとなっています。
SURFによる高速抽出
SURFはSIFTに比べて高速に特徴点を抽出できるアルゴリズムとして注目されています。
リアルタイム性が求められるシーンでの利用が期待されるため、処理速度が重要な場合に検討されます。
プレフィルタリングの利点
SURFは画像処理の前にブロブ(斑点)検出のための積分画像などを用いるため、処理の高速化が可能です。
この手法は多少の精度低下があると言われるものの、リアルタイム処理においては大いにメリットとなります。
特徴量マッチングの基礎
SURFの抽出した記述子同士のマッチングは、ユークリッド距離やその他の類似性指標を用いて行うことができ、画像同士の類似度を評価する際の基礎となります。
これにより、複数画像の特徴点を対応付けて認識することが可能になります。
アルゴリズム組み合わせによる解析
複数の手法を組み合わせることで、解析の精度を向上させることが可能です。
エッジ検出と特徴量抽出を適切に統合することで、画像内の複雑なパターン認識にも柔軟に対応できるようになります。
複合処理のメリット
複数手法を組み合わせると、一方の手法の弱点が他方により補完される効果が期待できます。
エッジ検出と特徴量抽出の統合
エッジ検出によって得られた輪郭情報と、特徴量抽出で捉えた局所情報を統合することで、画像内の構造をより正確に捉える解析手法が実現できます。
たとえば、物体の輪郭と内部テクスチャの両方を考慮して分類を行うと、誤検出のリスクが低減されます。
解析精度向上の工夫
組み合わせたアルゴリズムでは、各処理段階で得た結果を相互に補完する仕組みを導入すると良いです。
具体的には、エッジ情報を特徴抽出の際の領域分割に利用したり、特徴量のマッチング結果をエッジ検出結果と重ね合わせることで、より高い精度の結果が得られるよう工夫することが求められます。
画像パターンの識別戦略
解析結果を活かすために、画像全体のパターンを明確に識別する戦略が大切です。
領域分割の手法
画像を複数の領域に分割する手法は、局所的な情報に注目するために有効です。
例えば、グリッド状の分割や領域成長法によって、興味深い部分を抽出し、各領域ごとに異なる特徴量を計算すると、細かいパターンを識別しやすくなります。
パターン認識のための閾値設定
各種の検出結果に対して適切な閾値を設定することで、ノイズと実際のパターンを効果的に区別することが可能です。
経験的または統計的に求めた閾値を用いると、画像全体の解析精度が向上します。
パフォーマンス最適化とデバッグ
解析の効率性と安定性を高めるために、C++やOpenCV固有の最適化技法やデバッグ戦略についてもしっかりと押さえておく必要があります。
C++の最適化技法
C++を用いた実装では、メモリ管理や計算効率の向上を意識した工夫が重要です。
メモリ管理と効率性
画像データなどの大容量データを扱う場合、適切なメモリ管理が不可欠です。
スマートポインタやMove Semanticsを使用して、無駄なメモリコピーを防止するとともに、計算効率の向上にもつながる工夫が求められます。
並列処理の実装
OpenCVは並列処理に対応した関数も提供しているため、複数のスレッドを活用して処理速度を上げることが可能です。
マルチコアCPU環境では、並列化を検討することで処理時間を大幅に短縮できます。
OpenCV特有のデバッグ戦略
OpenCVの各関数は、期待した通りに動作しているかどうかを個別にデバッグする方法があるため、効率的なデバッグ手法を身につけることは重要です。
関数ごとの動作確認方法
関数単位でのデバッグには、関数の返り値や出力画像の特性を確認する手法が有用です。
たとえば、各処理後に中間結果を表示して、想定と一致するかどうかを確かめることで、問題箇所が特定しやすくなります。
不具合発生時の対策
不具合が発生した際には、エラーメッセージやログを確認し、問題の原因箇所を迅速に特定することが求められます。
場合によっては、簡単なサンプルコードを用いて個別に動作検証を実施することで、問題解決の手助けになります。
実験結果と評価指標
実際に実装した画像解析の結果に対して、各手法の精度や効果を定量的に評価することは、検証と改善にとって大切な工程です。
ここでは、エッジ検出や特徴量抽出の評価基準について紹介します。
画像解析結果の指標
解析結果の評価指標は、目的に応じて複数の観点で検討するのが良いです。
エッジ検出の精度評価
エッジ検出の場合、正確な輪郭が抽出されるか、不要なノイズが排除されているかなどを数値化するため、F値や精度、再現率といった指標が用いられることがあります。
これらの評価は、抽出されたエッジの位置と実際の物体の輪郭との一致度を元に計算されるため、定量的な改善策を検討する際に役立ちます。
特徴量抽出の正確性
特徴量抽出では、正確な対応点がいくつ捉えられているか、またそのマッチング精度がどの程度かなどを評価することが一般的です。
例えば、RANSACなどの手法を使って誤検出を排除する試みなど、評価の工夫があると実用的な解析に近づきます。
比較と考察
複数の手法を組み合わせた結果、各手法のメリットとデメリットが現れるため、以下のような比較が有用です。
各手法のメリット・デメリット
- Canny法は精度が高いが、パラメータの調整が必要
- Sobel法はシンプルで計算が速いが、ノイズに弱い場合がある
- Laplacian法は明瞭なエッジを強調できるが、事前処理が必須
最適組み合わせの探索
画像の種類や解析目的に合わせて、各手法の組み合わせを検討すると良いです。
実験結果を基に、複数のアルゴリズムを組み合わせることで、最適な解析パイプラインが構築できるため、処理の柔軟性と精度向上が期待できる仕組みになっていることを確認することが大切です。
応用事例の展望
テクスチャ解析技術は、さまざまな分野での応用が期待されます。
画像や動画の処理を通して、実社会においても多くのメリットを提供する可能性を秘めています。
画像解析の応用分野
産業用途との連携
製造ラインの検査や品質管理、素材の状態評価など、産業分野での応用が進んでいます。
異常検知や欠陥部分の発見に活かすと、製品の品質向上に直結する効果が期待できるため、技術の進化とともに幅広く利用される分野です。
エンターテインメント分野での活用
ゲームや映像制作など、エンターテインメント業界でもリアルタイム処理技術として利用される機会が増えてきています。
たとえば、動体検知やリアルタイムフィルタ処理によって、視覚効果の強化に寄与するなど、クリエイティブな表現の拡大にも役立ちます。
今後の展開可能性
技術の進歩とともに、テクスチャ解析の手法やその組み合わせにも新たな展開が見られるでしょう。
より精度の高い解析手法や、ディープラーニングとの融合が進むにつれて、さらなる可能性が広がっています。
新手法との融合
最近では、従来の手法に加え、ディープラーニングを用いた画像解析が注目されています。
従来のエッジ検出や特徴量抽出技術と組み合わせることで、精度や速度の面で相互補完が進む可能性があるため、今後の技術トレンドとして期待されています。
技術進化との関連性
新しいハードウェアの登場やアルゴリズムの改良によって、従来よりも効率的に画像解析を実施できる環境が整いつつあります。
これにより、リアルタイム処理や大規模な画像データの扱いが容易になり、さまざまな分野への応用がより一層現実味を帯びるものとなるでしょう。
まとめ
今回の内容は、画像前処理からエッジ検出、特徴量抽出まで、各工程について具体的かつ柔らかい文体で説明しました。
実際にC++とOpenCVを活用する際のサンプルコードやアルゴリズムの特徴を交えて紹介することで、解析の各ステップの重要性や応用可能性が伝わるよう工夫しました。
各手法同士の連携を意識すれば、より高度な画像解析が目指せることを理解しやすくなったと感じてもらえると嬉しいです。
今後の発展が楽しみな分野であり、実装と検証を楽しみながら進めてもらえればと思います。