【C++】OpenCVで実現する迅速かつ高精度な物体検出アルゴリズムの実装方法
C++とOpenCVを用いた物体検出は、画像や映像内の対象物を見つけ出す技術です。
Haar分類器、テンプレートマッチング、連結成分分析などの手法を組み合わせることで、顔やその他の物体を正確かつ効率的に捉えることができます。
各アルゴリズムの特性を活かしながら柔軟に対処できるため、画像処理の幅広いシーンで活用できる点が魅力です。
物体検出アルゴリズムの基礎
OpenCVを用いた物体検出の全体像
OpenCVは、画像処理や機械学習のアルゴリズムを簡単に利用できるライブラリで、C++と組み合わせることで高速な物体検出が実現できるです。
画像の前処理から物体検出、検出結果の描画まで、一連の処理が統一的な関数群で扱えるため、実装がシンプルになります。
検出手法としては、Haar分類器、テンプレートマッチング、連結成分分析などがあり、それぞれ検出対象や利用する環境に応じて使い分けが可能です。
Haar分類器による検出
動作原理と特徴
Haar分類器は、特徴量抽出にHaar-like特徴量を用いることで、画像中の特定パターンを素早く検出する手法です。
- 画像をグレースケールに変換し、各領域の輝度差などの特徴を計算します
- 複数の弱学習器を段階的に適用する「カスケード分類器」によって、検出候補の領域を絞り込みます
この手法は学習済みの分類器を利用するため、リアルタイム処理に向いており、顔検出などにもよく利用されます。
カスケード分類器の利用にはカスケードファイルが必要です。
OpenCVをインストールすると、多くの環境ではhaarcascade_frontalface_default.xmlファイルが自動的に含まれています。以下のようなパスに存在することが多いです。
/usr/share/opencv4/haarcascades/haarcascade_frontalface_default.xmlopencv\sources\data\haarcascades\haarcascade_frontalface_default.xmlカスケードファイルをコピーしてカレントディレクトリに配置するなどをして、使える状態にしておきましょう。
下記はHaar分類器による顔検出のサンプルコードです。
#include <opencv2/opencv.hpp>
#include <iostream>
#include <vector>
int main() {
// 画像の読み込み
cv::Mat image = cv::imread("sample_image.jpg");
if (image.empty()) {
std::cerr << "画像の読み込みに失敗しました" << std::endl;
return -1;
}
// グレースケール変換
cv::Mat gray;
cv::cvtColor(image, gray, cv::COLOR_BGR2GRAY);
// Haar分類器の読み込み
cv::CascadeClassifier faceCascade;
if (!faceCascade.load("haarcascade_frontalface_default.xml")) {
std::cerr << "分類器の読み込みに失敗しました" << std::endl;
return -1;
}
// 顔検出
std::vector<cv::Rect> faces;
faceCascade.detectMultiScale(gray, faces, 1.1, 3, 0, cv::Size(30, 30));
// 検出された顔の領域に矩形を描画
for (size_t i = 0; i < faces.size(); i++) {
cv::rectangle(image, faces[i], cv::Scalar(255, 0, 0), 2);
}
// 検出結果の表示
cv::imshow("Detected Faces", image);
cv::waitKey(0);
return 0;
}// 実行時には、顔検出が行われた画像ウィンドウが表示され、青い矩形で顔が囲まれている出力となります。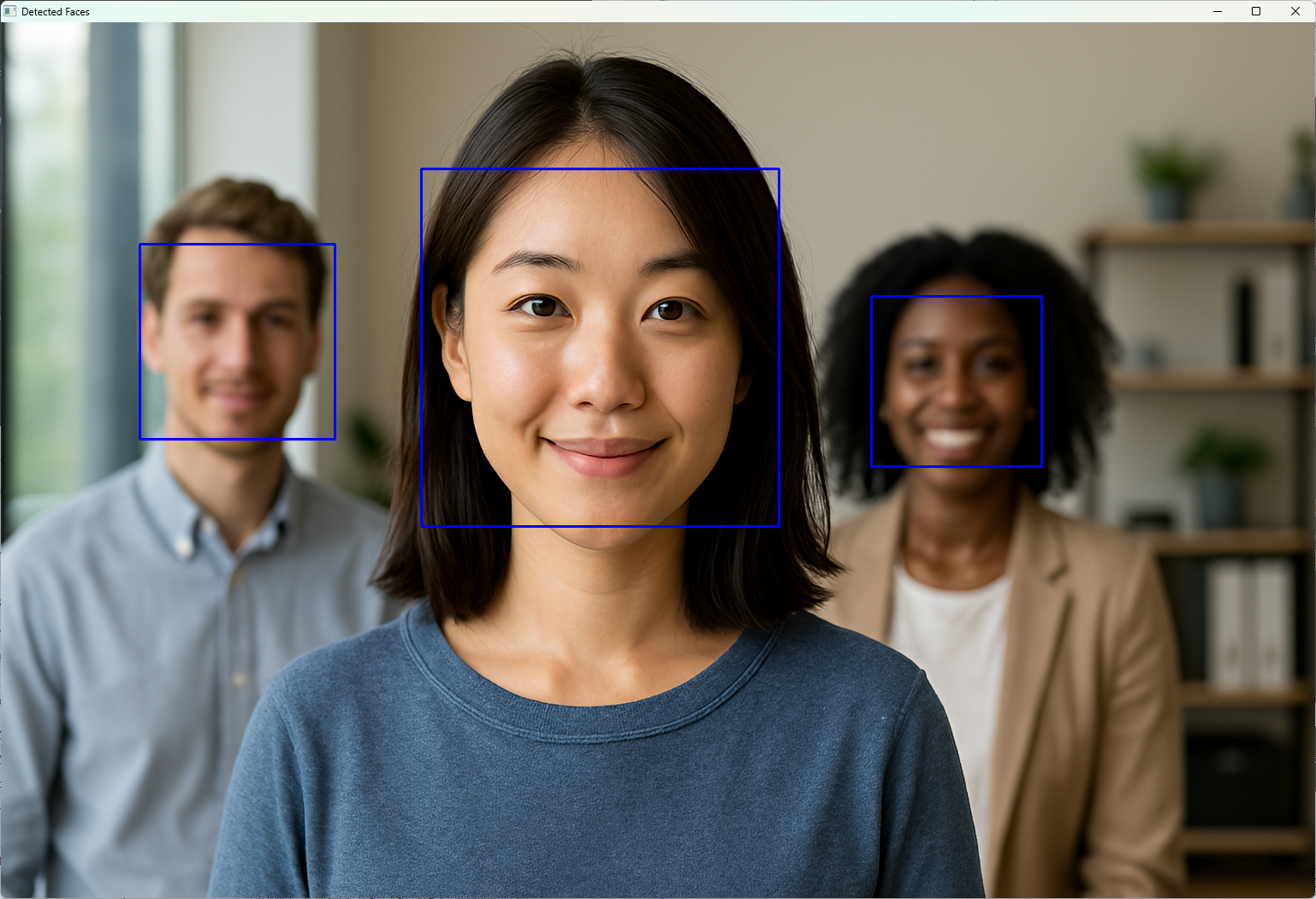
適用可能な対象と精度の調整
Haar分類器は顔や目、車両など、事前に学習された対象の検出に向いています。
- 検出対象に応じた学習済みカスケード分類器を用いると、誤認識が減少します
- パラメータとしては、スケールファクターや最小検出サイズを調整することで、検出精度の改善が期待できます
各パラメータの調整は、検出対象のサイズや撮影条件に合わせて微調整することが望ましいです。
検出プロセスの流れ
Haar分類器の検出プロセスは、以下の手順で進むです。
- 入力画像をグレースケールに変換
- カスケード分類器を適用し、複数の検出候補を取得
- 各候補に対して、矩形などで表示
- 検出結果の画像を出力または表示
シンプルなコードで実装できるため、初心者にも扱いやすい手法となっています。
テンプレートマッチングによる検出
類似度スコアの算出方法
テンプレートマッチングは、入力画像内にテンプレート画像が含まれるかどうかを検索する手法です。
cv::matchTemplate関数を用いて、入力画像とテンプレート画像間の類似度マップを算出します- 類似度は、相互相関や正規化相互相関などの手法で計算され、結果として得られるスコア値が大きいほど一致度が高いです
- 数式で表すと、類似度スコアは
\[R(x,y)=\sum_{x’,y’}T(x’,y’)I(x+x’,y+y’)\]
のように表現でき、画像内でのパターンの一致を測定します。
マッチング精度の向上対策
テンプレートマッチングの精度を向上するためには、以下のような工夫が有効です。
- 画像前処理として平滑化やエッジ検出を実施し、ノイズを除去する
- 複数のテンプレートや回転・拡大縮小されたバリエーションを利用して、検出候補を増やす
- 類似度の閾値を適切に設定し、誤検出を減らす
利用上の留意点
テンプレートマッチングはシンプルなアルゴリズムなので、計算量が多くなることもあります。
- 特に高解像度の画像でテンプレートサイズが大きい場合、処理速度に影響を及ぼす可能性がです
- また、照明条件や画像の変形がある場合、類似度スコアが低下するため、安定した検出には慎重な前処理が必要です
下記はテンプレートマッチングを用いた物体検出のサンプルコードです。
#include <opencv2/opencv.hpp>
#include <iostream>
int main() {
// 画像とテンプレート画像の読み込み
cv::Mat image = cv::imread("sample_image.jpg");
cv::Mat templ = cv::imread("sample_template.jpg");
if (image.empty() || templ.empty()) {
std::cerr << "画像またはテンプレートの読み込みに失敗しました" << std::endl;
return -1;
}
// テンプレートマッチングの実施
cv::Mat result;
cv::matchTemplate(image, templ, result, cv::TM_CCOEFF_NORMED);
// 最も類似度が高い位置を探索
double minVal, maxVal;
cv::Point minLoc, maxLoc;
cv::minMaxLoc(result, &minVal, &maxVal, &minLoc, &maxLoc);
// 検出された領域に矩形を描画
cv::rectangle(image, maxLoc, cv::Point(maxLoc.x + templ.cols, maxLoc.y + templ.rows), cv::Scalar(0, 0, 255), 2);
// 結果の表示
cv::imshow("Template Matching Result", image);
cv::waitKey(0);
return 0;
}// テンプレートと一致する部分が赤い矩形で囲まれた画像が表示されます。連結成分分析を用いた検出
輪郭抽出と領域分割
連結成分分析は、二値画像内で連続した領域を検出する手法です。
- 入力画像をしきい値処理で二値化し、オブジェクトの輪郭を抽出します
- 各連続成分の境界を取得することで、個々の物体の領域を分割することが可能です
この手法は、物体の形状や位置情報を数値的に扱えるため、検出後の形状解析にも役立ちます。
前処理との連動性
連結成分分析は、前処理の段階でノイズ除去や二値化処理を行うことで、その精度が大きく向上します。
- 輪郭抽出前に適切な平滑化やエッジ検出を施すと、誤検出が減少します
- 複数の前処理手法を組み合わせ、最適な二値画像を生成することが求められます
下記は連結成分分析を使った物体検出のサンプルコードです。
#include <opencv2/opencv.hpp>
#include <iostream>
int main() {
// グレースケール画像の読み込み
cv::Mat image = cv::imread("sample_image.jpg", cv::IMREAD_GRAYSCALE);
if (image.empty()) {
std::cerr << "画像の読み込みに失敗しました" << std::endl;
return -1;
}
// 画像の二値化
cv::Mat binary;
cv::threshold(image, binary, 128, 255, cv::THRESH_BINARY);
// 連結成分分析の実施
cv::Mat labels, stats, centroids;
int nLabels = cv::connectedComponentsWithStats(binary, labels, stats, centroids);
// 検出結果の描画用画像生成
cv::Mat result = cv::Mat::zeros(image.size(), CV_8UC3);
for (int i = 1; i < nLabels; i++) {
cv::Rect rect(stats.at<int>(i, cv::CC_STAT_LEFT),
stats.at<int>(i, cv::CC_STAT_TOP),
stats.at<int>(i, cv::CC_STAT_WIDTH),
stats.at<int>(i, cv::CC_STAT_HEIGHT));
cv::rectangle(result, rect, cv::Scalar(0, 255, 0), 2);
}
// 結果の表示
cv::imshow("Connected Components", result);
cv::waitKey(0);
return 0;
}// 緑の矩形で各連結成分が囲まれた画像が表示され、物体ごとに領域が認識されます。画像前処理と特徴抽出
カラースペース変換の役割
画像前処理においては、カラースペース変換が重要な役割を果たします。
- 入力画像をグレースケールやHSV、Labなどに変換することで、検出アルゴリズムによって扱いやすい特徴情報を抽出できます
- 輪郭やエッジの強調、ノイズの低減など、変換後の画像によって、次段階の処理の効果が大きく変わります
グレースケール変換の利点
グレースケール変換は、色情報を一旦取り除き、明暗情報のみを扱う手法です。
- 処理がシンプルになり、計算負荷が軽減されるため、リアルタイム処理にも適しています
- 輪郭検出やエッジ解析など、輝度の変化を主眼にした分析に非常に有効です
他の色空間への変換手法
HSVやLabなどの色空間に変換すると、色相・彩度・明度が分離されるため、特定の色の抽出や領域分割がしやすくなります。
- 画像の環境に応じた色空間の利用が求められ、用途によっては複数の色空間を組み合わせることも可能です
- 特に、複雑な照明条件下での物体検出において、効果的な前処理となるです
ノイズ除去とフィルタリング
画像処理では、ノイズ除去が非常に大切です。
- 不要なノイズが検出結果に悪影響を与えるため、フィルタ処理が必須です
中値フィルタの活用法
中値フィルタは、画素ごとに近傍の中央値を取ることで、スパイク状のノイズを除去します。
- エッジを保護しながら、ランダムなノイズを低減する特徴があります
- 特に、塩胡椒ノイズの除去に効果的です
ガウシアンフィルタによる平滑化
ガウシアンフィルタは、ガウス分布に基づいた重みを利用して、画像を平滑化します。
- ノイズ除去とエッジ近傍のぼやけのバランスを取りながら、画像全体の平滑化を実現します
- 平滑化後の画像は、物体検出アルゴリズムの入力としても適しているです
エッジ検出と輪郭解析
画像から物体を抽出する上で、エッジ検出と輪郭解析は基礎的な役割を果たします。
- 画像中の急激な輝度変化を検出し、物体の境界を明確にするための前処理として利用されます
Cannyエッジ検出の基本
Cannyエッジ検出は、まず画像の平滑化、次に勾配計算を行い、エッジ候補を抽出します。
- ノイズに対して比較的強く、かつエッジの細部も捉えることができるため、多くの画像処理シーンで好んで使用されます
- エッジ検出後の二値画像は、物体領域の抽出につながります
輪郭抽出と形状近似
エッジ検出後に、連続するエッジの集合から輪郭を形成し、物体の形状を検出することができます。
- 輪郭抽出は、画像上の閉じた形状やオブジェクトの外形を定量的に解析するために用いられます
- 得られた輪郭に対して、多角形近似などの手法を適用すると、検出した物体の形状をシンプルに表現できるです
物体検出のパラメータ調整
検出精度向上のための設定
物体検出においては、パラメータの調整が非常に重要な役割を果たします。
- 使用するアルゴリズムのパラメータを適切に設定することで、誤検出の低減や検出精度の向上が期待できるです
- 調整すべき主な項目としては、スケールファクターや最小検出対象サイズなどが挙げられます
スケールファクターの最適化
スケールファクターは、画像内の物体の大きさに合わせてスケール変化を制御するパラメータです。
- 小刻みなスケール調整は、検出漏れの防止に役立ちますが、同時に計算量が増加します
- 適切な値を見極めるために、実験的に値を変化させながら検証することが求められます
最小検出対象サイズの調整
最小検出対象サイズは、検出すべき物体の最小寸法を設定するパラメータです。
- 小さすぎる値に設定すると、ノイズが誤検出される恐れがあり、大きすぎる値にすると小さな物体が見逃される可能性があります
- 使用する用途に合わせ、最適なサイズを設定するよう心がけるです
誤検出防止の工夫
検出アルゴリズムでは、誤検出を防ぐための工夫が欠かせません。
- ノイズや微細な変化を除外し、確実な検出対象のみを抽出することが目的です
閾値設定とその調整方法
検出における閾値は、検出結果を判断する上での重要な指標です。
- 類似度スコアや輝度値などの閾値を適切に設定し、必要に応じて動的な調整を行います
- 閾値を自動的に最適化するアルゴリズムも研究されており、場合によっては適応的に変更する方法が用いられます
ノンマキシマムサプレッションの活用
ノンマキシマムサプレッションは、重複して検出される領域を排除する技術です。
- 一度検出された物体周辺の重複する検出結果を除去し、最も適切な位置のみを選択するため、検出の正確性が向上します
- 物体検出アルゴリズム全体の処理の中で、重要な後処理手法として利用されます
処理速度と最適化手法
計算効率向上の取り組み
物体検出システムでは、計算効率を上げるための工夫が必要です。
- 高速な処理を実現することで、リアルタイム解析や大量画像の高速処理が可能になります
- 並列処理やアルゴリズムの最適化など、さまざまな技術が取り入れられています
並列処理の手法
並列処理は、複数のスレッドやコアを利用して、同時に複数の処理を実行する技術です。
- OpenCVの一部機能は並列化されており、設定によって自動で最適な処理が行われることが多いです
- 自身で実装する際には、
std::threadやOpenMPなどを活用して、計算の分散を実施する方法が一般的です
プロファイリングによる改善策
プロファイリングは、プログラムの実行速度のボトルネックを特定するために用いられる手法です。
- 処理時間が長い関数やアルゴリズム部分に注目し、最適化する対象を絞り込みます
- プロファイラツールを利用すると、どの部分に時間がかかっているのかを可視化でき、効率改善に役立ちます
リアルタイム処理への対応
リアルタイムの物体検出を実現するためには、処理速度の向上が求められるです。
- 各処理段階を最適化し、画像のフレームレートを維持する工夫が必要です
- 実際の利用環境に合わせたハードウェアの選定も、重要な要素となります
フレームレート最適化のポイント
リアルタイム処理では、フレームごとの処理時間を短縮することが目標です。
- 不要な処理の排除や、画像サイズの縮小などで、負荷を軽減します
- また、アルゴリズム自体の複雑度を見直し、必要な精度と速度のバランスを取ることが求められます
GPU利用による高速化戦略
GPUの高い並列処理能力を活用することで、画像処理の高速化を実現できます。
- CUDAやOpenCLを利用して、CPUでは処理が難しい大規模な画像データの演算を効率化します
- 最近のバージョンのOpenCVはGPUアクセラレーションに対応しており、ハードウェアの恩恵を受けながら処理速度の向上が期待できます
オブジェクトトラッキングとの連携
連続フレーム解析の基本
物体検出と連続フレーム解析を組み合わせると、動画内での物体の動きを追跡できるです。
- 静止画像での検出結果を時間軸に沿って連結することで、対象の動きや変化を把握します
- 連続したフレームごとに検出を行い、前のフレームからの情報を利用する手法が用いられます
追跡アルゴリズムとの統合
トラッキングアルゴリズム(例えば、KalmanフィルタやMeanshift、Camshiftなど)を統合することで、
- 突然の検出漏れやノイズによる不安定な検出を補完することができるです
- オブジェクトの再検出が必要な場合も、追跡アルゴリズムとの連携によりスムーズな動作が期待できます
対象再検出の工夫
トラッキング中に対象が一時的に消失した場合、再検出を行うための工夫が必要です。
- 検出結果とトラッキング結果を組み合わせ、対象の位置を補間することで、安定した追跡が可能となります
- 短時間の外れ値を除去するフィルタリング手法や、追跡信頼度に応じた再検出基準が用いられます
応用シーンにおける実装ポイント
物体検出とトラッキングの技術を活用するシーンは多岐に渡ります。
- 監視カメラシステムや自動運転、スポーツ解析など、用途に応じた実装が可能です
- 各シーンの要求に合わせ、パラメータやアルゴリズムの調整が求められるです
監視用途での活用事例
監視用途では、連続して物体を検出・追跡することが求められます。
- 複数のカメラ映像から、対象人物や車両の動きをリアルタイムに抽出するシステムが利用されます
- 各カメラ間での連携や、エリアごとの検出精度の調整が重要なポイントとなります
モバイル環境への対応策
モバイル環境では、処理能力や消費電力が限られているため、
- 軽量なアルゴリズムと効率的な最適化が必要です
- ハードウェアアクセラレーション(例えば、スマートフォンの専用プロセッサ)を有効に活用することで、リアルタイム性を維持できます
まとめ
ここまで、OpenCVを用いた物体検出の各技術について柔らかい文体で説明してきました。
Haar分類器、テンプレートマッチング、連結成分分析を中心に、画像前処理やパラメータ調整、処理速度の最適化、さらにはオブジェクトトラッキングとの連携まで、幅広い観点から解説を進めたです。
各手法にはそれぞれのメリットと注意点があり、用途や環境に合わせた柔軟な実装が大切になるです。
今回の内容を参考に、実際のシステム開発や実験において、最適な物体検出アルゴリズムの選択と調整が進むことを期待しているです。