【C++】OpenCVによるドロネー分割とボロノイ図生成の実践手法
C++とOpenCVを用いると、画像上や点群データからポイントを抽出し、Subdiv2Dクラスによるドロネー分割が手軽に実現できます。
取得した三角形分割や対応するボロノイ図は、解析や視覚効果向上に活用できるため、幅広い分野で有用な機能です。
ドロネー分割の基本
定義と主要な特徴
ドロネー分割は、与えられた点集合を三角形に分ける手法です。
各三角形の辺がほかの点を含まないという特徴があり、計算幾何学や画像処理、メッシュ生成などの分野で広く利用されています。
点ができるだけ均等に含まれるように分割されるため、結果として得られる三角形の形状が安定しやすく、計算効率や形状の一貫性が重視されるアプリケーションにも適しています。
また、点の位置によって自動的に最適な三角形が形成されるため、入力データの分布に応じた柔軟な処理が可能です。
各三角形が隣接することで、部分的な変形や局所的な拡大縮小にも対応しやすいという利点があります。
ボロノイ図との関係
ドロネー分割とボロノイ図は、互いに双対的な関係にあります。
ボロノイ図は、各点からの距離が最も近い領域に分割する手法で、空間全体を多角形の形状で分けることになります。
ポイントの配置により、ドロネー分割によって得られた三角形とボロノイ図の各セルが密接に関連しており、1つの分割手法からもう1つを容易に導出できる構造が用意されています。
たとえば、各ボロノイセルの頂点は、隣接するドロネー三角形の外接円の中心位置につながっており、2つの手法が連動して機能する仕組みになっています。
OpenCVでの実装手法
OpenCVのライブラリを利用すると、ドロネー分割とボロノイ図の生成が比較的簡単に実装できます。
以下の項目では、Subdiv2Dクラスの利用方法やその内部での点の挿入、エッジリストの取得などについて詳しく説明します。
Subdiv2Dクラスの概要
OpenCVのSubdiv2Dクラスは、2次元空間におけるドロネー分割の管理やボロノイ図の生成をサポートするために設計されています。
クラスは、初期の領域設定によって、画像全体や指定された矩形領域内で点の挿入と分割を行います。
Subdiv2Dクラスの機能を利用することで、複雑な幾何学構造も簡単な操作で扱えるようになります。
初期領域設定と管理
領域の設定は、画像のサイズに応じた矩形を利用することで行います。
画像全体を対象とする場合、画像の横幅と縦幅を利用して矩形を定義し、その領域内で分割処理が行われます。
以下に、簡単な初期設定のサンプルコードを示します。
#include <opencv2/core.hpp>
#include <opencv2/imgproc.hpp>
#include <opencv2/highgui.hpp>
#include <vector>
#include <string>
int main() {
std::string filename = "sample.jpg"; // 処理対象の画像ファイルパス
cv::Mat img = cv::imread(filename, cv::IMREAD_COLOR);
if (img.empty()) {
return -1; // 画像が正しく読み込めなかった場合に終了
}
// 画像サイズから領域を定義
cv::Rect rect(0, 0, img.cols, img.rows);
// Subdiv2Dクラスを利用して、指定した矩形内に分割処理を行う
cv::Subdiv2D subdiv(rect);
// 処理対象の点をいくつか定義して挿入
std::vector<cv::Point2f> points = {
cv::Point2f(150.0f, 150.0f),
cv::Point2f(300.0f, 200.0f),
cv::Point2f(250.0f, 350.0f),
cv::Point2f(100.0f, 300.0f)
};
for (const auto& pt : points) {
subdiv.insert(pt); // 各点をSubdiv2Dに挿入する
}
cv::Mat vis = img.clone();
// ドロネー分割結果のエッジを取得して描画する
std::vector<cv::Vec4f> edgeList;
subdiv.getEdgeList(edgeList);
for (const auto& edge : edgeList) {
cv::line(vis, cv::Point2f(edge[0], edge[1]), cv::Point2f(edge[2], edge[3]), cv::Scalar(0, 255, 0));
}
cv::imshow("Delaunay Triangulation", vis);
cv::waitKey(0);
return 0;
}画像ウィンドウに、緑色の線で囲まれたドロネー分割の三角形が確認できます。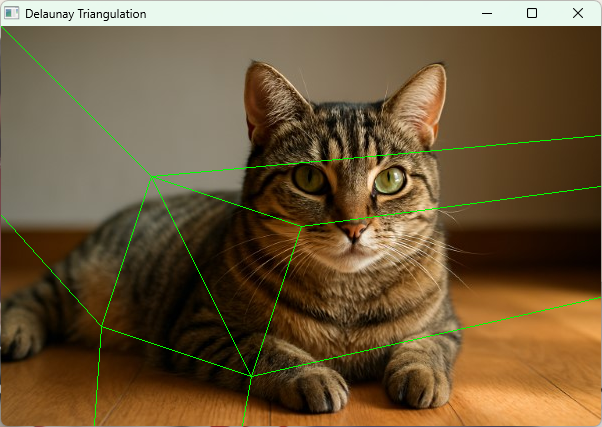
初期領域の設定は、正しい矩形を用意することがポイントです。
画像全体を対象とする場合だけでなく、特定の部分に限定した処理を行いたい場合にも柔軟に対応できます。
点の挿入操作の詳細
点の挿入は、Subdiv2Dクラスのinsertメソッドを利用して行います。
適切な点配置が実装の成否に大きく影響するため、入力点の数や位置は慎重に指定する必要があります。
点の挿入により、内部で自動的に分割構造が再構築され、ドロネー分割の性質に沿った三角形が生成されます。
点の挿入操作は繰り返し行うこともでき、リアルタイムの画像処理や動的なデータ更新に対応できる仕組みが整っています。
ドロネー三角形の生成
Subdiv2Dクラスを利用すると、入力された点に基づき自動的に三角形分割が行われます。
この処理により、ドロネー分割の三角形が生成され、各エッジが隣接する三角形の条件を満たすように構造化されます。
エッジリストの取得方法
ドロネー三角形の生成結果を利用するために、getEdgeListメソッドを利用してエッジリストを取得します。
得られたエッジリストは、各エッジの始点と終点が順次格納され、後の描画や解析に役立ちます。
エッジリストの取得方法はシンプルで、以下のようなコードとなります。
#include <opencv2/core.hpp>
#include <opencv2/imgproc.hpp>
#include <opencv2/highgui.hpp>
#include <vector>
#include <string>
int main() {
std::string filename = "sample.jpg";
cv::Mat img = cv::imread(filename, cv::IMREAD_COLOR);
if (img.empty()) {
return -1;
}
cv::Rect rect(0, 0, img.cols, img.rows);
cv::Subdiv2D subdiv(rect);
// 適当な点を挿入
std::vector<cv::Point2f> points = {
cv::Point2f(120.0f, 180.0f),
cv::Point2f(280.0f, 160.0f),
cv::Point2f(200.0f, 320.0f),
cv::Point2f(80.0f, 240.0f)
};
for (const auto& pt : points) {
subdiv.insert(pt);
}
// エッジリストを取得して描画
std::vector<cv::Vec4f> edgeList;
subdiv.getEdgeList(edgeList);
cv::Mat out = img.clone();
for (const auto& edge : edgeList) {
cv::line(out, cv::Point2f(edge[0], edge[1]), cv::Point2f(edge[2], edge[3]), cv::Scalar(0, 255, 0));
}
cv::imshow("Delaunay Edges", out);
cv::waitKey(0);
return 0;
}ウィンドウに緑色の線でエッジが描画され、ドロネー三角形の構造が目視できます。このエッジリストを利用することで、描画以外にも三角形同士の関係や境界条件の解析に役立てることができます。
分割構造の解析
取得したエッジリストを基に、各三角形の構造を解析することが可能です。
例えば、隣接関係や各エッジの長さ、角度などを計算することで、より詳細な幾何学的解析や後処理としてのフィルタリングが行えます。
ここでの解析は、以下のポイントに注意して進めるとよいです。
- 各エッジの始点と終点の座標を正しく取得すること
- 取得したエッジが重複しないかの検証
- 三角形単位での面積や内角の計算
これらを組み合わせると、画像処理のみならず、立体的なメッシュ生成にも応用できる柔軟なアルゴリズム解析が可能になります。
アルゴネー内部の流れ
今回の処理では、入力された点集合に基づき、内部で複数のアルゴリズムが連携して働いています。
以下に、点集合の管理とボロノイ図生成における処理の流れを詳しく説明します。
点集合の管理と処理
入力データとして点集合が与えられると、まずその点が内部的に管理され、効率の良い探索と配置が行われます。
点集合管理の処理においては、各点同士の関係や座標系の正確な保持が求められます。
適切なポイントの選定方法
点の選定は、以下のようなポイントに注意して行うとよいです。
- 入力画像やデータから正確な位置情報を抽出すること
- 異常な値やノイズを含む点は事前にフィルタリングすること
- 必要に応じて点の密度を調整し、分割の精度を保つこと
このような配慮により、後続の分割処理での安定性が向上し、より見やすい結果が得られます。
内部処理の分割プロセス
内部では、入力された点が自動的に挿入され、その都度再配置が実施されます。
以下の手順で処理が進行します。
- 初期領域内に第1段階の点を配置
- 各点の挿入ごとに、既存の三角形分割構造を更新
- 更新後、新たに生成されたエッジの情報を保持
このプロセスによって、動的な点の追加や削除にも柔軟に対応できる仕組みが実装されています。
ボロノイ図生成の仕組み
内部の点集合を基に、ボロノイ図が生成されると、各点に最も近い領域が自動的に計算されます。
この結果、画面上に多角形が形成され、見た目にも明快な領域分割が実現されます。
多角形の形成処理
ボロノイ図では、各点を中心に、その点に最も近い範囲内が多角形として表示されます。
getVoronoiFacetListメソッドを利用すると、各セルの頂点情報が取得可能です。
以下にサンプルコードの例を示します。
#include <opencv2/core.hpp>
#include <opencv2/imgproc.hpp>
#include <opencv2/highgui.hpp>
#include <vector>
#include <string>
int main() {
std::string filename = "sample.jpg";
cv::Mat img = cv::imread(filename, cv::IMREAD_COLOR);
if (img.empty()) {
return -1;
}
cv::Rect rect(0, 0, img.cols, img.rows);
cv::Subdiv2D subdiv(rect);
// サンプル用の点を挿入
std::vector<cv::Point2f> points = {
cv::Point2f(150.0f, 150.0f),
cv::Point2f(300.0f, 200.0f),
cv::Point2f(250.0f, 350.0f),
cv::Point2f(100.0f, 300.0f)
};
for (const auto& pt : points) {
subdiv.insert(pt);
}
// Voronoiセルの取得
std::vector<std::vector<cv::Point2f>> facetList;
std::vector<cv::Point2f> facetCenters;
subdiv.getVoronoiFacetList(std::vector<int>(), facetList, facetCenters);
cv::Mat vis = img.clone();
// 各ボロノイセルを描画
for (const auto& facet : facetList) {
if (facet.size() > 1) {
cv::Point2f pStart = facet[0];
for (size_t i = 1; i < facet.size(); ++i) {
cv::Point2f pEnd = facet[i];
cv::line(vis, pStart, pEnd, cv::Scalar(255, 255, 255));
pStart = pEnd;
}
// 始点と終点を連結してセルを閉じる
cv::line(vis, facet.back(), facet[0], cv::Scalar(255, 255, 255));
}
}
cv::imshow("Voronoi Diagram", vis);
cv::waitKey(0);
return 0;
}ウィンドウに白色の線でボロノイセルが描かれ、各点に対応する領域分割が確認できます。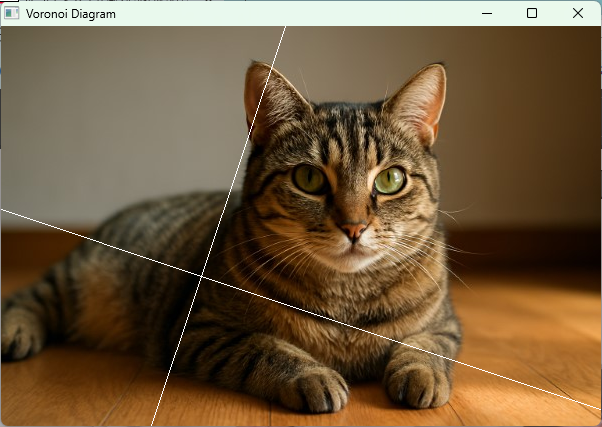
多角形の形成処理では、各点からの距離に基づいて頂点が計算され、実際のセルとして描画されるため、視覚的に分かりやすい領域分割が実現されます。
領域の連結と配置計算
多角形のセルを形成した後は、各セル同士がどのように連結しているかが計算されます。
連結情報は、後続処理において境界の平滑化やセル内のラベリングに活用されることが多いです。
連結計算では、セルごとに近接するセルとの共通エッジを検出し、領域全体で連続した構造を維持するための工夫が施されています。
計算方法としては、各頂点間の距離を比較し、所定の閾値以下の場合に連結とみなす手法などが採用されています。
エラー処理と最適化戦略
複雑な画像処理や点集合管理においては、入力データの妥当性チェックや例外処理、さらにはパフォーマンス向上のための最適化が重要なポイントとなります。
以下には、その具体的な方法について説明します。
入力データの検証
画像内の特徴点や入力された点集合に異常がないかを検証することは、とても大切な工程です。
入力データが正しい範囲に収まっているか確認することで、その後の計算や描画が無事に行われます。
不正値の検出基準
入力データの中には、例えば浮動小数点数の範囲外の値や、画像外に位置している点などが含まれる可能性があります。
その検出基準としては、以下のようなチェックを行います。
- 各点の座標が定義された領域内に収まっているか
- 異常な極値が存在しないか(たとえば、極端に大きな値や負の値)
- 重複した点が過剰に存在しないか
これらの基準を満たさない場合には、事前にノイズ除去やフィルタ処理を実施してから次の処理に進むのが望ましいです。
例外処理のタイミング
入力チェックが十分に行われた後でも、実行時に予期しない例外が発生する可能性があります。
たとえば、読み込んだ画像が空であったり、点の挿入に失敗した場合などが考えられます。
そうした場合には、早期にエラーを検知し、適切なメッセージを表示して処理を中断するか、代替処理へ移行する設計が求められます。
エラー処理は、各重要な処理の直前に実施するのが一般的です。
処理性能向上の工夫
画像処理や点集合管理が大規模なデータを扱う場合、計算速度やメモリ使用量が重要な課題となります。
これらの性能向上のための工夫も取り入れると、実際のアプリケーションで快適な動作が期待できます。
メモリ管理の工夫
入力された多数の点や生成される三角形、ボロノイセルなどのデータを効率的に管理するために、動的メモリの割り当てやキャッシュの利用、必要なときだけメモリを確保するなどの工夫が活用されます。
メモリリークや冗長なデータコピーを防ぐために、適切なデータ構造が選定されることが求められます。
高速処理のための対策
高速処理を実現するための対策としては、アルゴリズムの並列化や部分ごとのキャッシング、実際のコンピュータ環境に応じた最適化が採用されます。
たとえば、以下のような方法が考えられます。
- 多重スレッド処理による並列計算の実装
- 計算済みの結果をキャッシュに保持し、再計算を避ける仕組み
- アルゴリズムのボトルネックとなる部分の計算精度と速度のバランスを調整
これらの対策によって、大量のデータをリアルタイムで処理する場合でも、十分な速度と安定性を確保することができます。
応用例と拡張性の検証
ドロネー分割とボロノイ図の技術は、単なる画像処理だけではなく様々な分野に応用できる汎用的な手法です。
以下では、実際の画像解析との統合や、別のデータ形式への応用について具体的に紹介します。
画像解析への統合事例
画像解析の分野では、抽出した特徴点を基にドロネー分割・ボロノイ図を用いて、対象物の形状や境界を明確にする方法が活用されています。
実務での活用パターン
実務の現場では、次のようなパターンで利用されることが多いです。
- 物体輪郭の抽出:複雑な形状を持つ物体の特徴点を抽出し、ドロネー分割により形状を細分化する
- メッシュ生成:点群データをもとにメッシュを構築し、3Dモデルへの応用
- 医療画像解析:CTやMRI画像から抽出したデータを解析し、組織や臓器の境界検出を行う
これらの応用例では、速度と精度のバランスが重要なため、前述のエラー処理や最適化の対策も大切にされています。
他アルゴリズムとの連携
ドロネー分割技術は、他のアルゴリズムと併用することで、さらなる高度な解析処理に発展させることが可能です。
たとえば、以下のような連携が考えられます。
- 輪郭認識アルゴリズムとの併用で、対象物の境界抽出を高度化
- クラスタリング手法と組み合わせて、領域ごとの特徴抽出を実現
- 動画像の解析に組み込んで、各フレームごとの形状変化をリアルタイムで追跡
これらの連携により、複雑なシーンや多様なパラメータが要求される現場でも柔軟に対応できる仕組みを構築できます。
異なるデータへの適用可能性
ドロネー分割は、平面上の画像データだけでなく、他の形式の点群データや高精度が求められる場合にも応用が可能です。
ここでは、主に点群データと高精度環境における対応策に焦点を当てます。
点群データの場合
各点が3次元空間上に存在する点群データに対しても、適切なプロジェクションや変換を行うことでドロネー分割の考え方を利用することができます。
具体的には、次の手順が有効です。
- 点群データを平面に射影し、2次元の点集合として扱う
- その後、射影面上でドロネー分割を実施し、結果を再び3次元空間に戻す
- 各点の位置情報を保持するために、座標変換の誤差を補正する仕組みを導入
この方法により、3Dメッシュ生成や構造解析にも対応できるため、様々な分野での利用が期待されます。
高精度環境での対応策
高精度が求められる環境では、計算の際の浮動小数点演算の精度や、データの整合性がさらに重要になります。
対応策としては、以下の工夫が挙げられます。
- 高精度のデータ型(たとえば、
double型など)を用いる - 誤差の蓄積を防ぐために、定期的なデータの再正規化やキャリブレーションを実施
- 並列処理や最適化ライブラリを利用して、計算速度を維持しながら高精度を実現
これらの対策を講じることで、非常に複雑な解析や大規模なデータ処理にも安心して取り組むことができます。
まとめ
今回説明した内容を振り返ると、ドロネー分割とボロノイ図の実装は、入力データの管理からエッジ取得、各種解析まで幅広く応用できる手法です。
OpenCVのSubdiv2Dクラスを活用することで、コードの記述もシンプルになり、さまざまな環境での実用性が向上します。
各処理工程でのエラー処理や最適化対策を取り入れると、信頼性とパフォーマンスが向上し、応用範囲も広がることが実感できる内容でした。
今回の内容を参考に、実際のプロジェクトへ柔軟に取り入れていただければと思います。